线性代数 学习笔记
2020-10-23
- 使用 RMarkdown 的
child参数,进行文档拼接。 - 这样拼接以后的笔记方便复习。
- 相关问题提交到 GitHub
本文于2020-10-23更新。 如发现问题或者有建议,欢迎提交 Issue
线性代数可以算是机器学习的基础。 线性代数的学习和复习我建议还找R或者Matlab,边跑边理解线性代数的一些特性和规则,这样比较形象直观。 R相关的例子,见 9.8。
- 无监督学习中的PCA的计算,底层使用到线性代数计算协方差矩阵,求解特征值等。
- PCA方式也是展示大数据特征向量的方法之一,详见 训练模型 training model 使用技巧 的 PCA的展示方式
1 线性变换几何理解
线性变换 (linear transformation) 从几何理解来看, 空间的拉伸和压缩。 (3Blue1Brown 2018, Edition 3) 在二维空间中,线性变换就是平面变换,原点不变。因为没有发生平移。 线性变换很常见,常用于基变换,见 8。
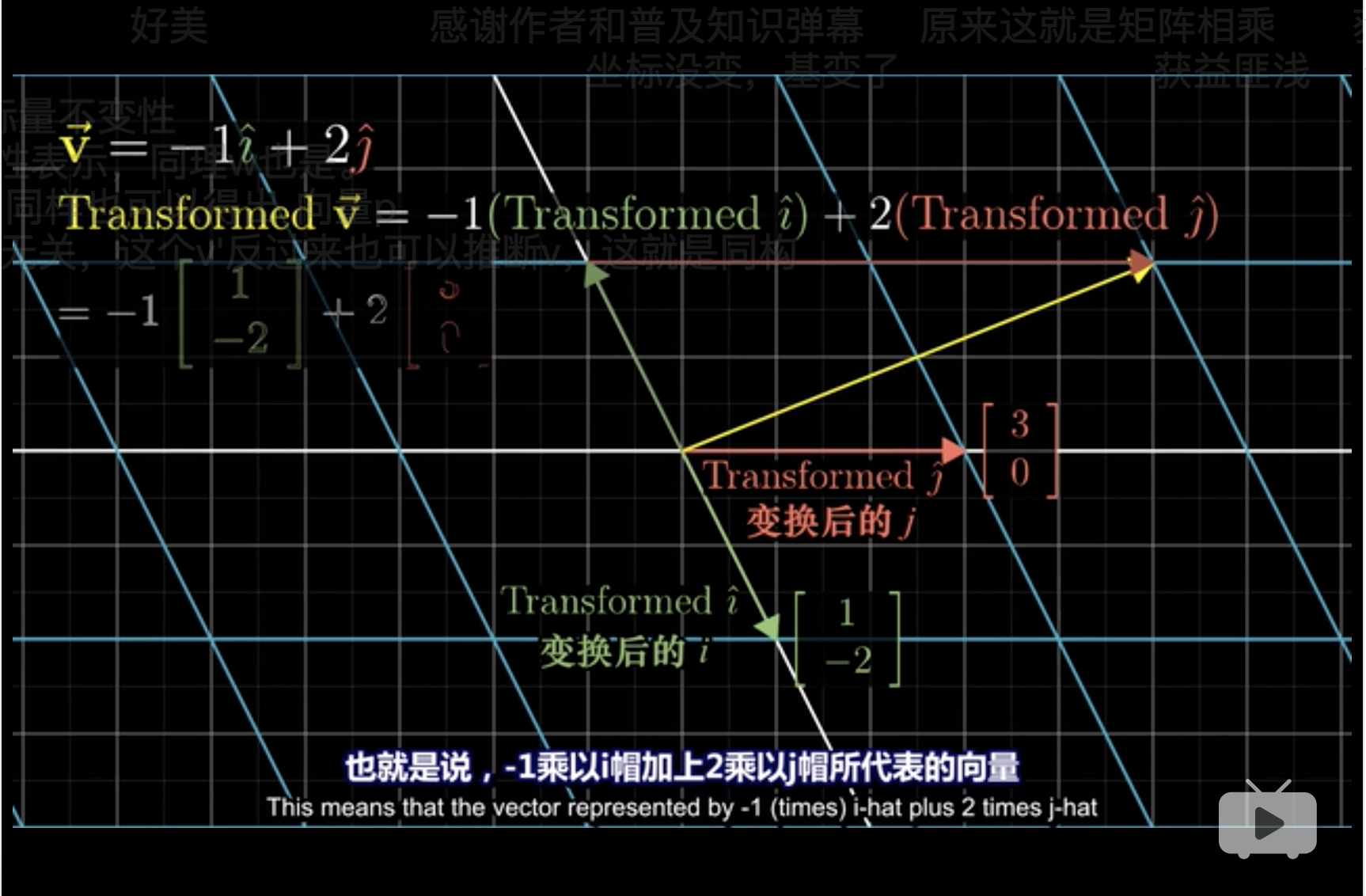
这里\(\vec{V} = -1 \hat i + 2 \hat j\),无论平面如何变化,这个关系不变,但是当平面通过旋转发生改变后, \(i\)和\(j\)发生了改变。 \[i=\begin{bmatrix} 1 \\ -2 \\ \end{bmatrix}\]且 \[j=\begin{bmatrix} 3 \\ 0 \\ \end{bmatrix}\]
所以,
\[\vec{V} = -1\begin{bmatrix} 1 \\ -2 \\ \end{bmatrix} + 2\begin{bmatrix} 3 \\ 0 \\ \end{bmatrix} = \begin{bmatrix} -1(1) + 2(3) \\ -1(-2) + 2(0) \\ \end{bmatrix}\]
在R可以实现,
## [,1] [,2]
## [1,] 1 3
## [2,] -2 0## [,1]
## [1,] -1
## [2,] 2## [,1] [,2]
## [1,] 1 3
## [2,] -2 0## [,1]
## [1,] -1
## [2,] 2## [,1]
## [1,] 5
## [2,] 2## [1] 5 2- 单位标准基
diag(2)对v没有影响 trans改变了v在原平面的表达trans的两列相当于两个基,v的两行对应两个基。
因此一半的,可以写成,
\[\begin{bmatrix} x \\ y \\ \end{bmatrix} \to x \begin{bmatrix} 1 \\ -2 \\ \end{bmatrix} + y\begin{bmatrix} 3 \\ 0 \\ \end{bmatrix} = \begin{bmatrix} 1x+3y \\ -2x+0y \end{bmatrix}\]
因此,
\[ \begin{bmatrix} 1 & 3 \\ -2 & 0 \\ \end{bmatrix} \begin{bmatrix} x \\ y \\ \end{bmatrix} = x \begin{bmatrix} 1 \\ -2 \\ \end{bmatrix} + y\begin{bmatrix} 3 \\ 0 \\ \end{bmatrix} \]
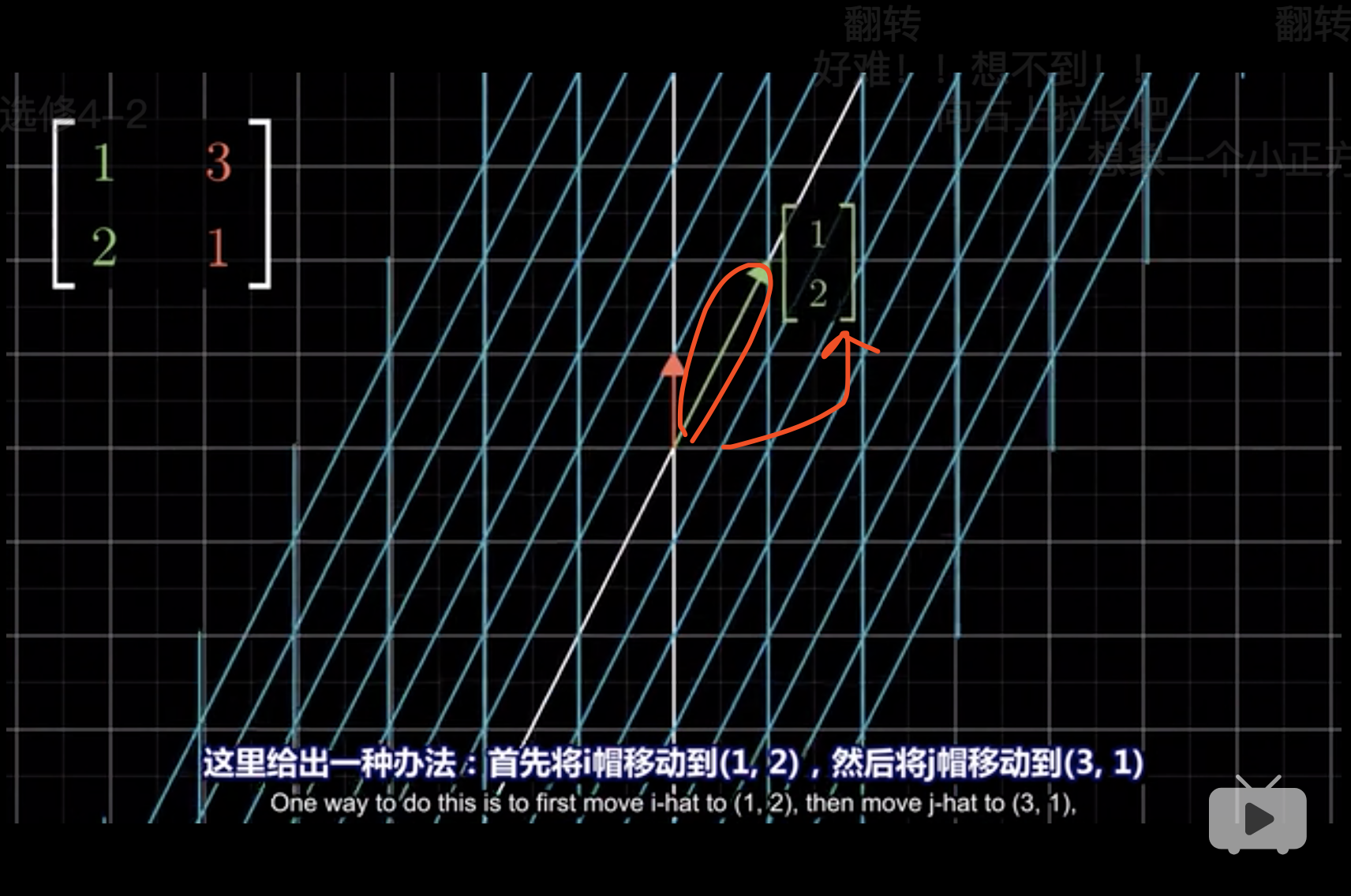
这种变化,就是把每个基的箭头看成一个点,
- 点\((1,0)\to(2,1)\)
- 然后平面翻转,点\((0,1)\to(3,1)\)
2 矩阵乘法理解
根据线性变换 见 1, 线性变化不改变原点的位置,但是压缩拉伸平面。 压缩拉伸的效果完全由基决定。
接下来具体讨论矩阵乘法理解在几何上的理解。 (3Blue1Brown 2018, Edition 4)
在几何上,矩阵乘法理解可以认为是,\(\vec{A} \times \vec{B}\)
- 作为基,压缩拉伸空间
- 作为一组向量,被基进行变换位置,原点不动。
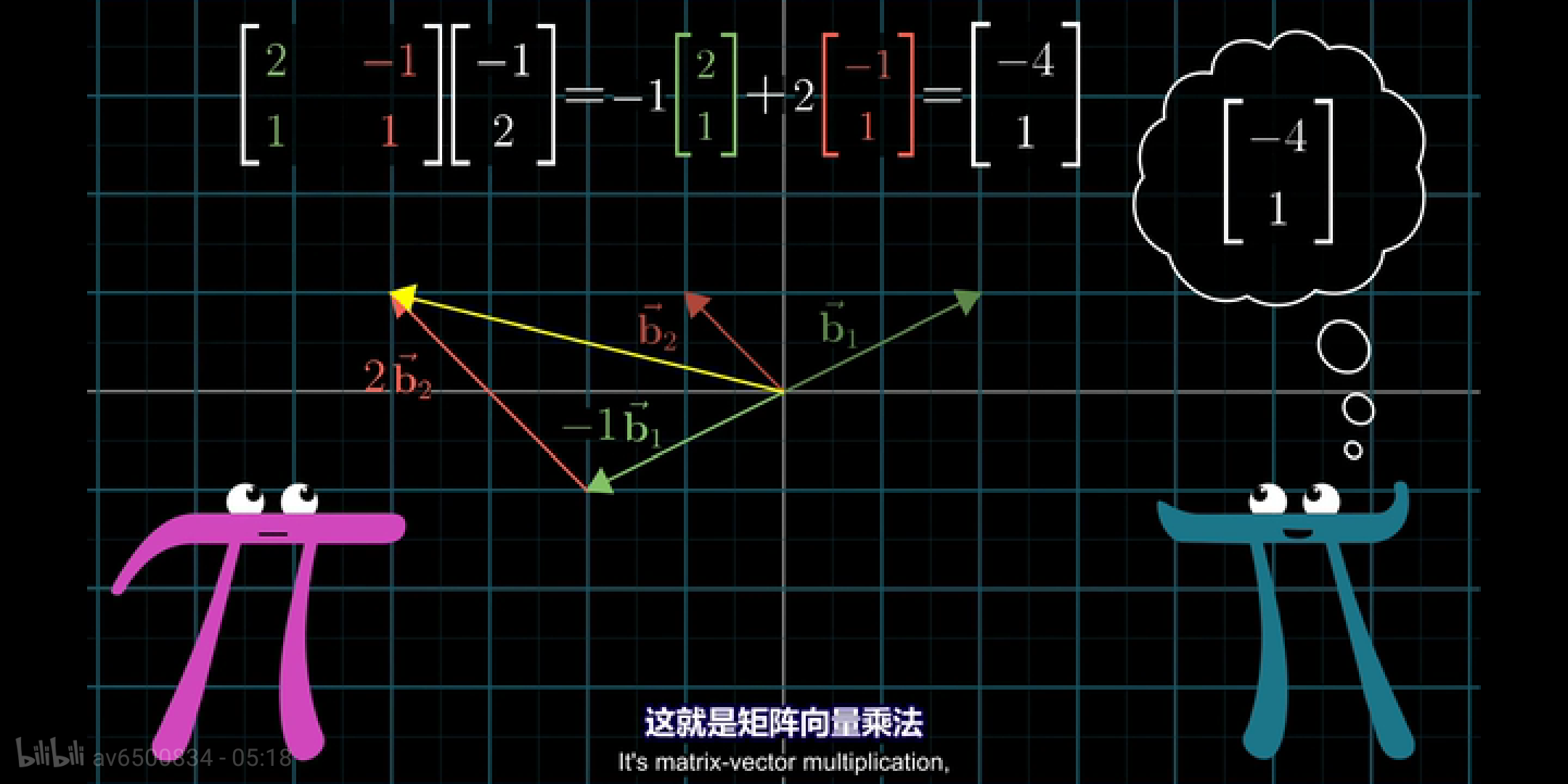
以下举一个具体的例子,\(M_1\)中的每个向量如何通过\(M_2\)进行变换。
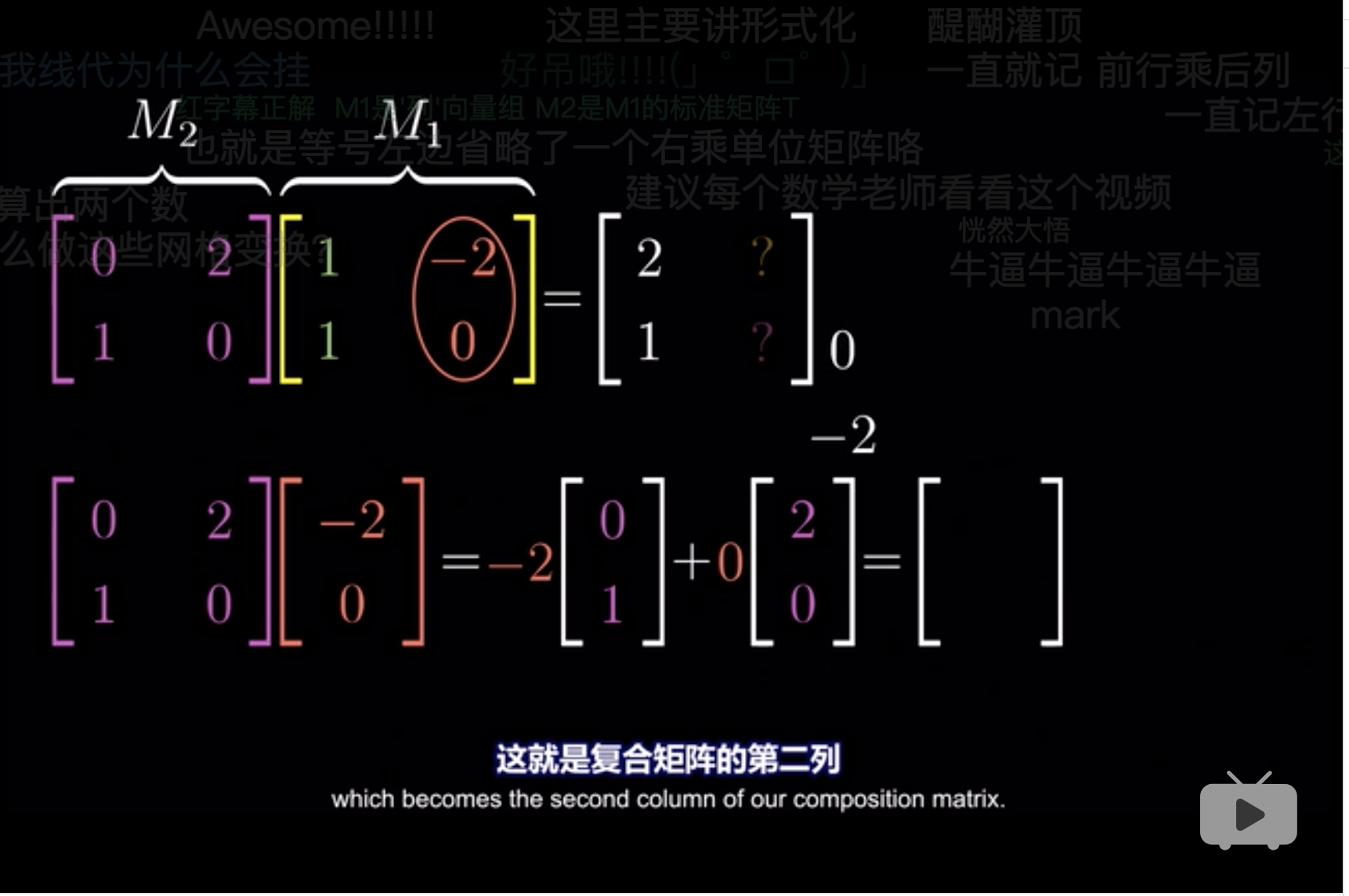
- 先将\(M_2\)中的\(\begin{bmatrix}0\\1\\ \end{bmatrix}\)看成一个基, \(\begin{bmatrix}0\\1\\ \end{bmatrix}\)和 \(M_1 = \begin{bmatrix}1 & -2 \\ 1 & 0 \\ \end{bmatrix}\)相乘
- 再将\(M_2\)中的\(\begin{bmatrix}2\\0\\\end{bmatrix}\)看成一个基, \(\begin{bmatrix}2\\0\\ \end{bmatrix}\)和 \(M_1 = \begin{bmatrix}1 & -2 \\ 1 & 0 \\ \end{bmatrix}\)相乘
具体在R=中的实现如下。
## [,1] [,2]
## [1,] 0 2
## [2,] 1 0## [,1] [,2]
## [1,] 1 -2
## [2,] 1 0## [,1] [,2]
## [1,] 1 -2
## [2,] 1 0## [,1] [,2]
## [1,] 2 0
## [2,] 1 -2## [1] 1 0## [1] 0 1## [,1] [,2]
## [1,] 1 -2## [,1] [,2]
## [1,] 1 0## [1] 0 1## [1] 2 0## [,1] [,2]
## [1,] 1 0## [,1] [,2]
## [1,] 2 -4- 将基
diag(2)[,1]替换成m2[,1] - 将基
diag(2)[,2]替换成m2[,2]
3 用面积理解行列式
在平面几何中 行列式 (determinant) 表示两个向量形成的平行是四边形的面积。 (3Blue1Brown 2018, Edition 5)
为了直观,我们先假设两个向量在标准正交基上。
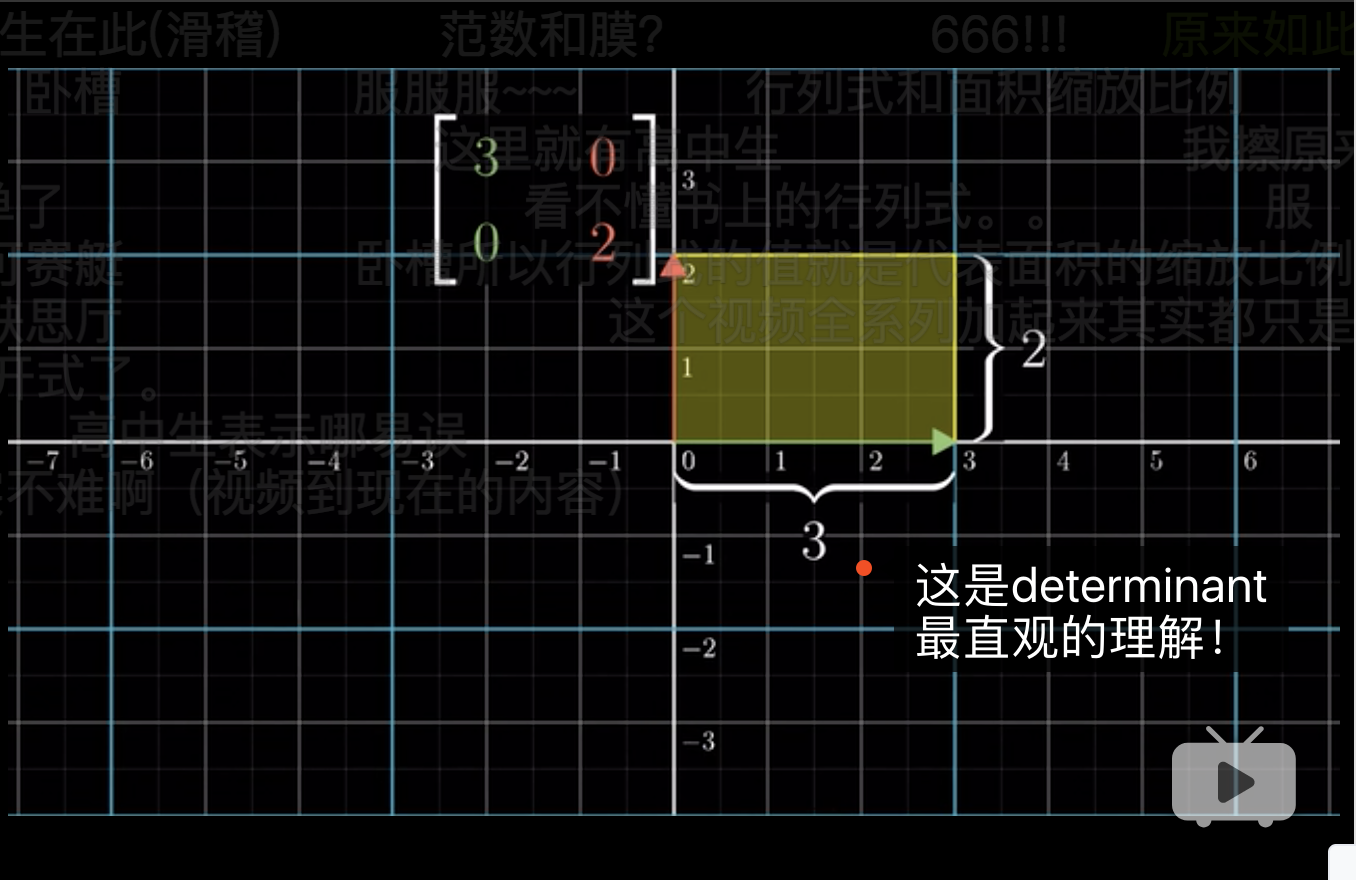
如图,在R中求解det,
## [,1] [,2]
## [1,] 3 0
## [2,] 0 2## [1] 6## [1] 63.1 det < 0 的情况
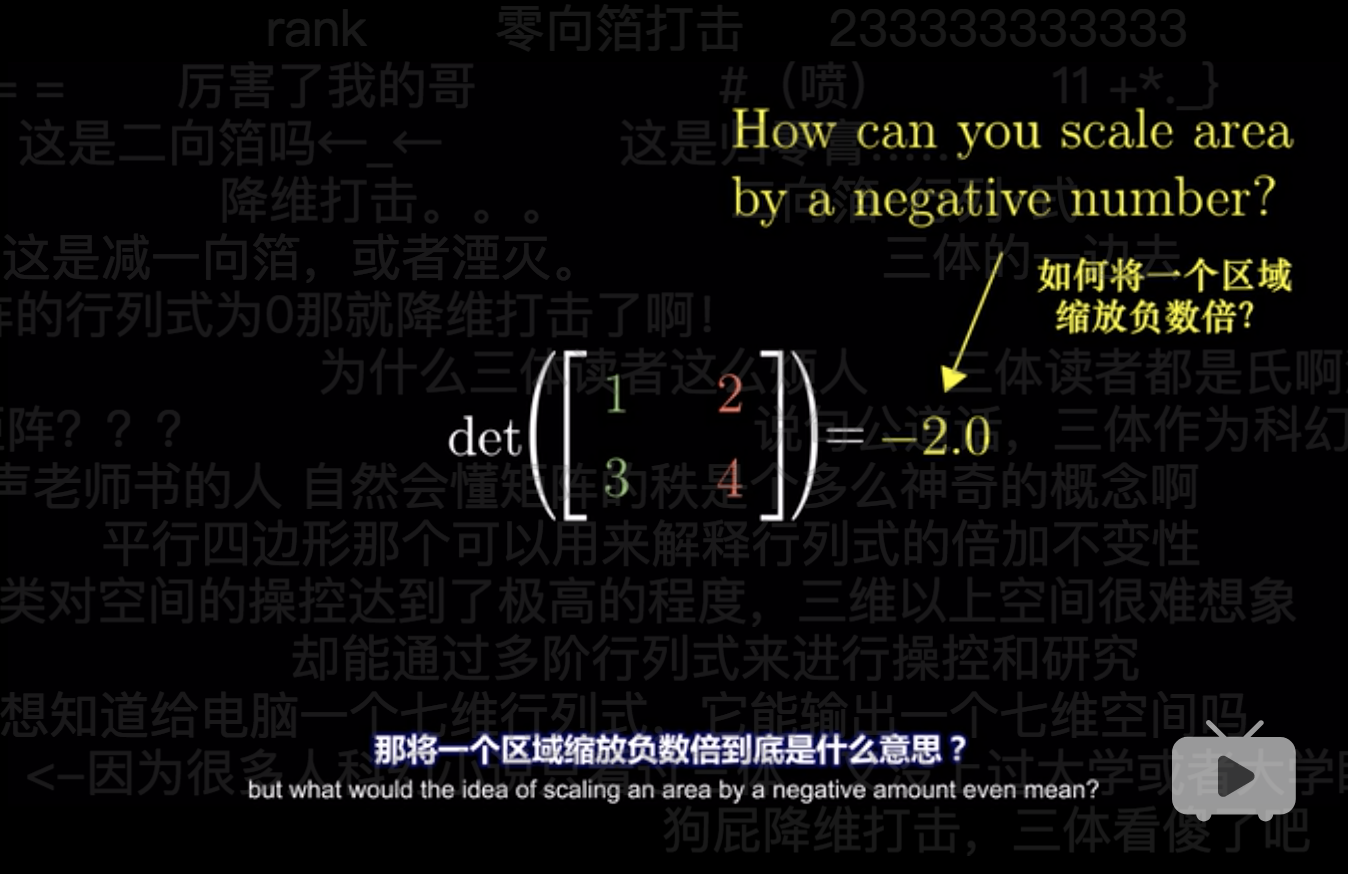
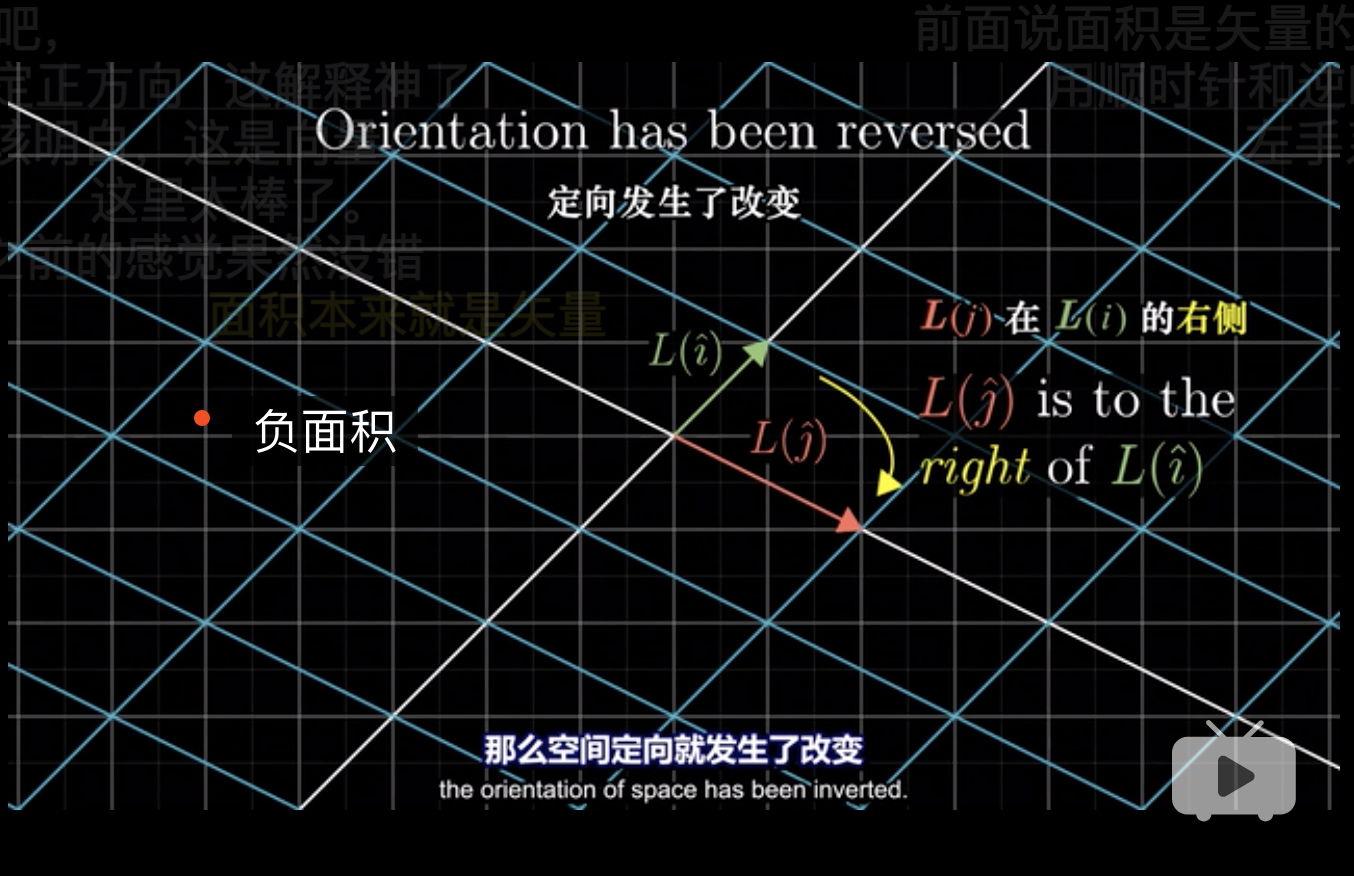
## [1] -2这个是很好的把几何和代数联系在一起了。 负面积就是线性变换 见 1 时翻转平面,180度的旋转。
实现过程上是\(i\)和\(j\)互换位置。
可以在R中进行验证,
## [,1] [,2]
## [1,] 2 1
## [2,] 4 3## [1] 23.2 如何理解反转
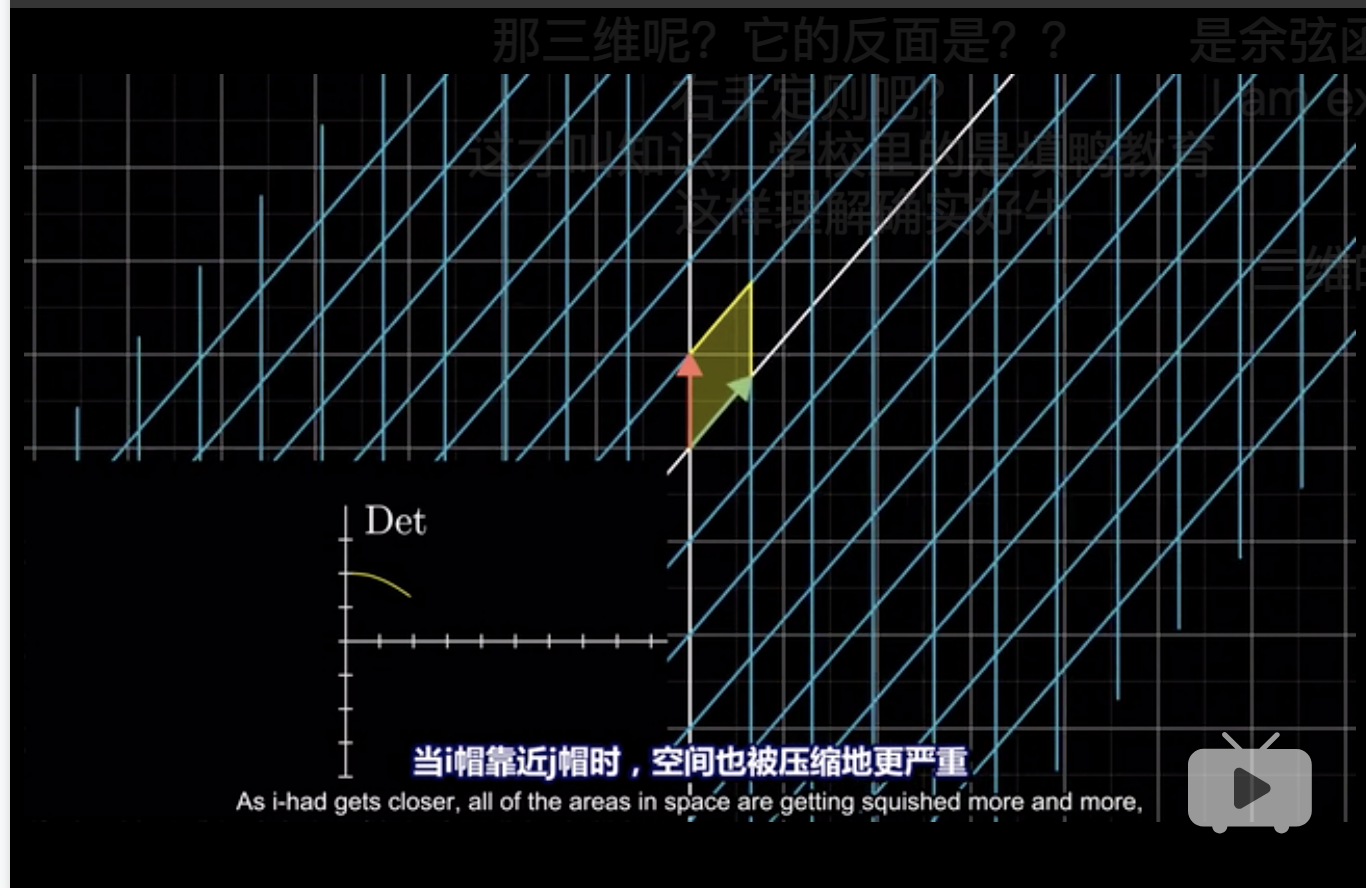
- 因为首先正常\(\to\)反转的过程中,一个过渡状态就是\(i\)和\(j\)共线
- 在平面挤压过程中,就好像平面在进行翻面一样,因为要和原平面保持垂直时,\(i\)和\(j\)在原平面上的投影看起来才是一条线上。
3维中的flip,就可以理解这个正方形进行了原点对称。
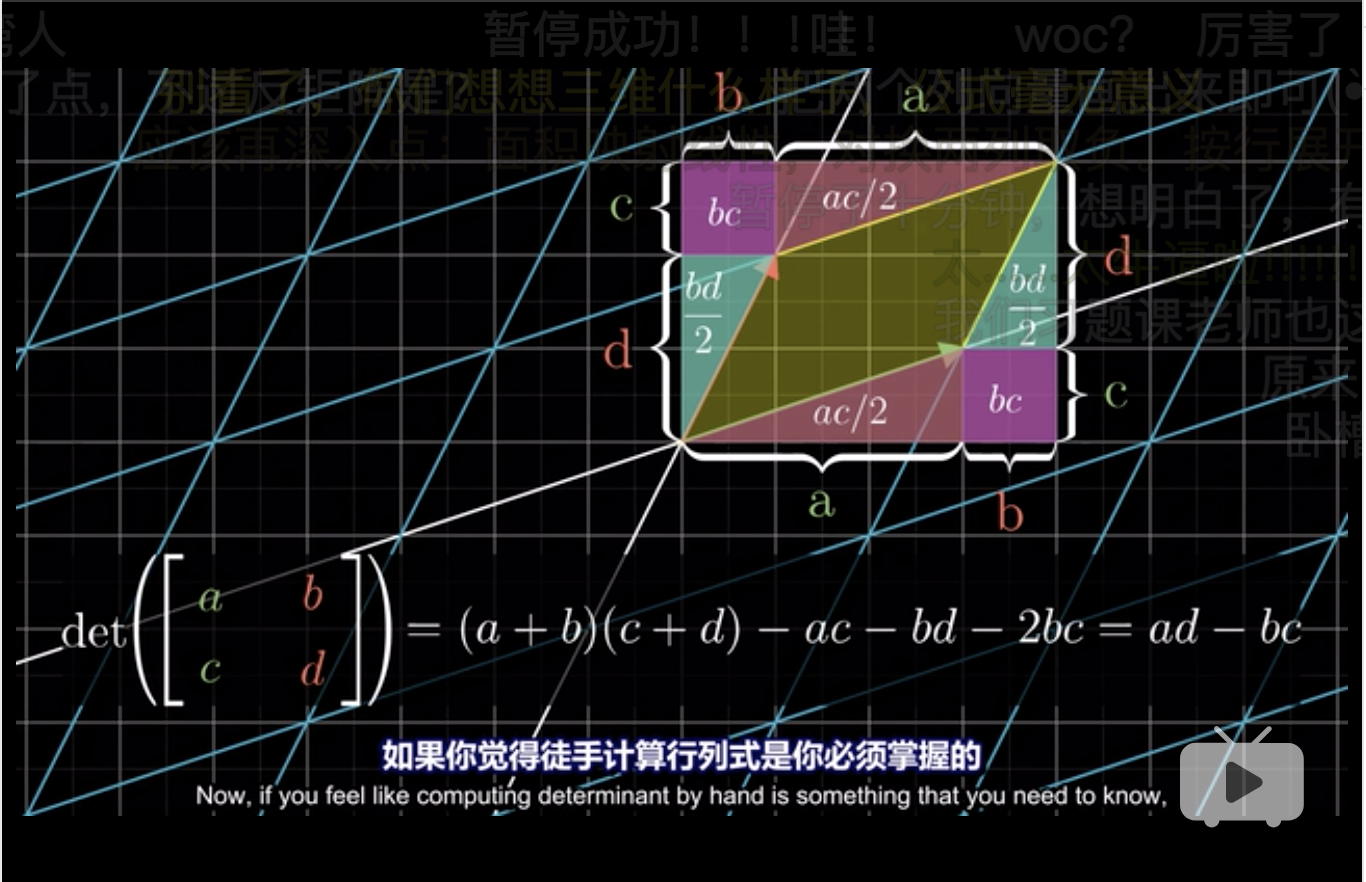
3.3 det 的计算公式推导
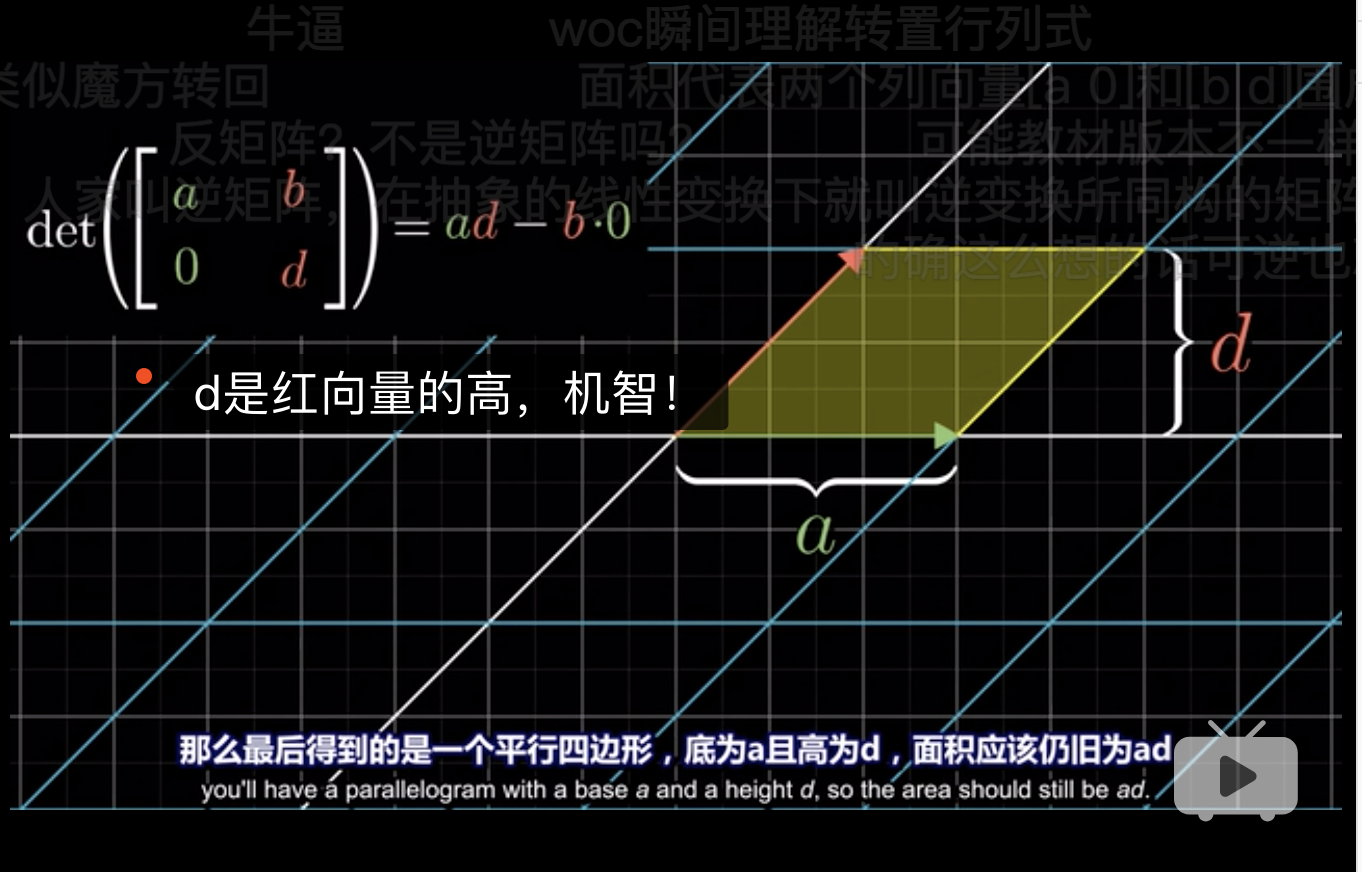
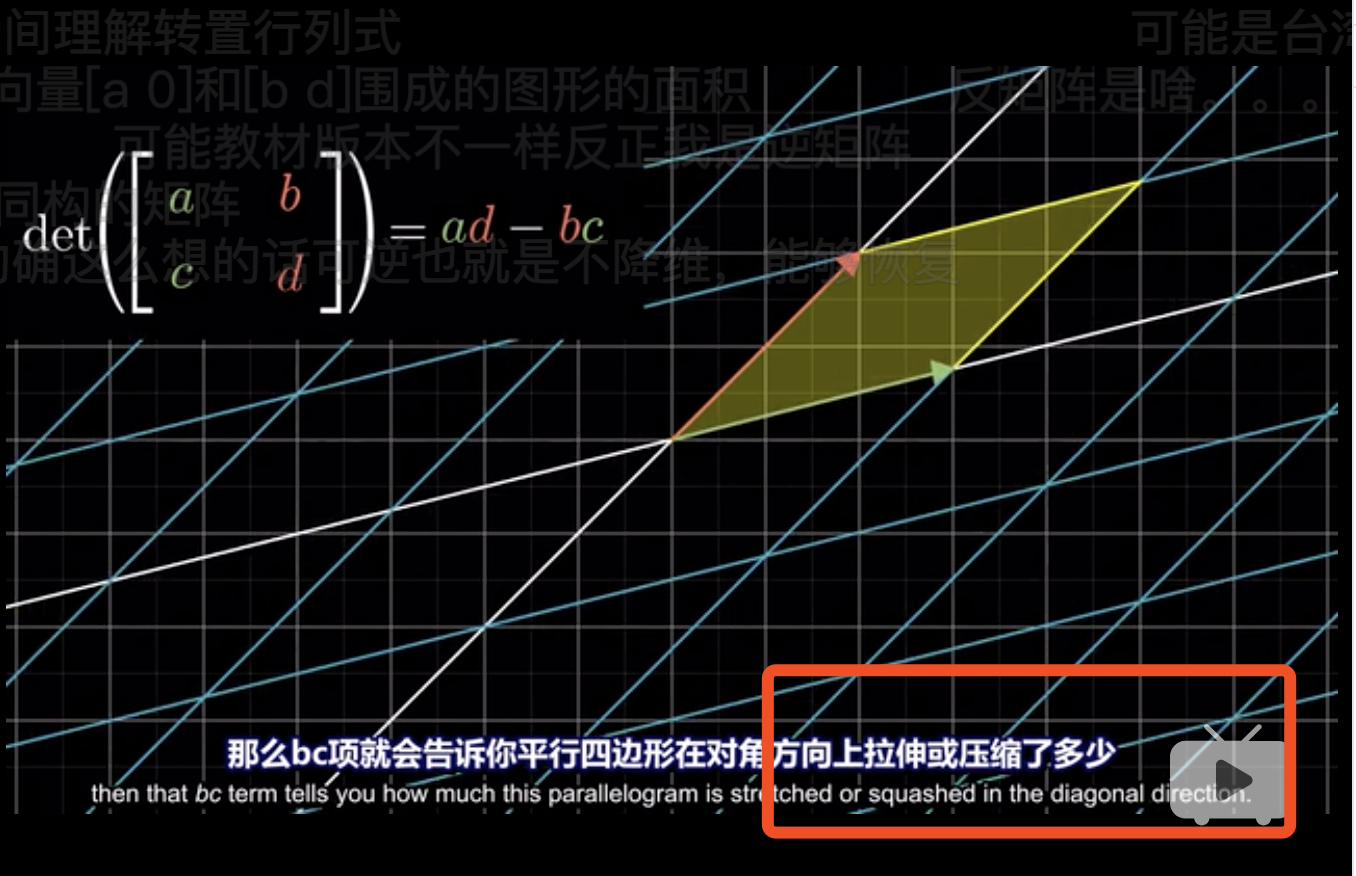
显然\(b\)和\(c\)衡量了红和绿向量向对角线的偏移,这导致了在计算面积时的高缩减了,因此这算是一种减少。
4 逆矩阵
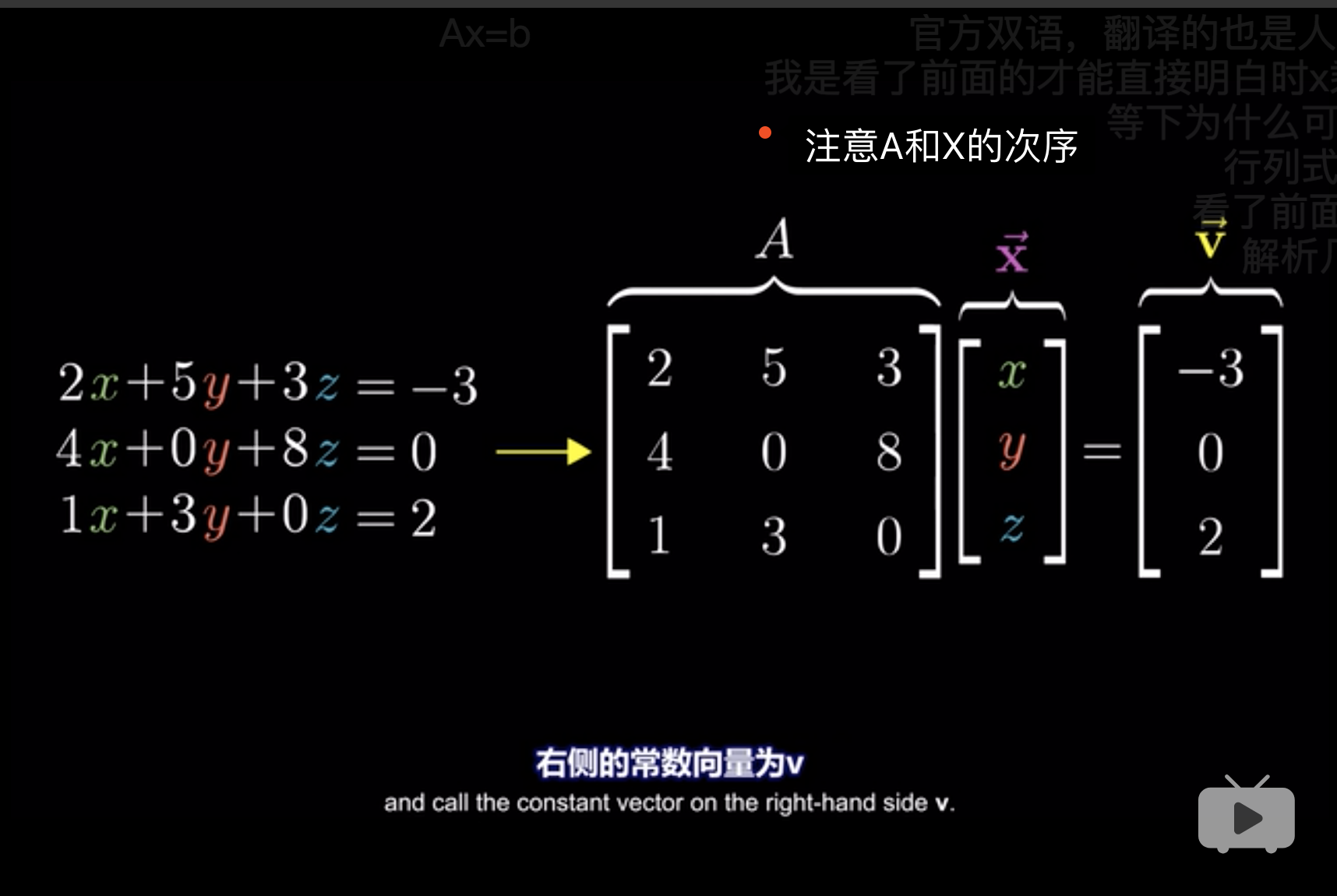
- 从几何角度,线性方程组可以理解为input \(x\),作为基,
- 基是常数项形成的向量,
- output就是右边的常数项形成的向量,
- output就是根据线性变换后的结果。
在R中实现,方程组的求解。
params_mtr <- matrix(c(2,5,3,4,0,8,1,3,0),nrow = 3,byrow = 3)
y_mtr <- matrix(c(-3,0,2),nrow = 3)
params_mtr## [,1] [,2] [,3]
## [1,] 2 5 3
## [2,] 4 0 8
## [3,] 1 3 0## [,1]
## [1,] -3
## [2,] 0
## [3,] 2## [,1]
## [1,] 5.428571
## [2,] -1.142857
## [3,] -2.714286solve用于求逆矩阵,参考 Eager (2018)
4.1 det(A) = 0
从几何意义上,\(\det(A) = 0\)
- 表示了面积为0,
- 相当于把一个二维向量压缩到了一个直线上,
- 这个时候,想要从一条直线返回到一个平面,存在无数种解,这就是不可逆。(3Blue1Brown 2018, Edition 6)
具体如下图,
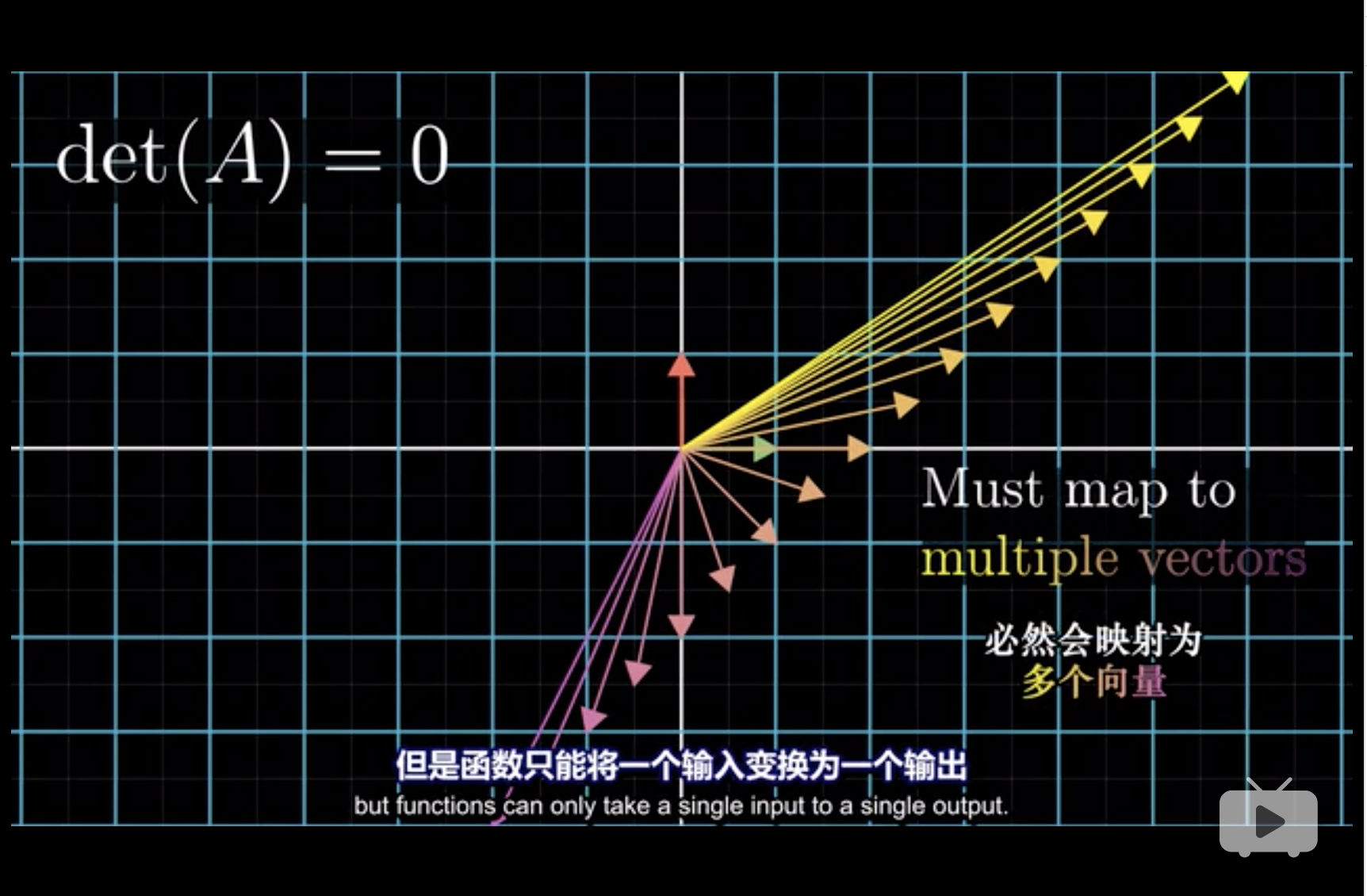
- 对应地,代数中,\(0 \cdot x = 1\)中,\(x\)可以为任意数。
4.2 \(\det(A^{-1}A)=1\)
## [,1] [,2]
## [1,] 1 2
## [2,] 3 4## [1] -2## [,1] [,2]
## [1,] -2.0 1.0
## [2,] 1.5 -0.5## [1] -0.5## [,1] [,2]
## [1,] 1 3
## [2,] 2 4## [1] -25 列空间、秩与零空间
![]()
\[\text{rank}(\text{input}) \geq \text{rank}(\text{output})\]
那么,
\[\text{collapse} = \Delta \text{rank} = \text{rank}(\text{input}) - \text{rank}(\text{output})\]
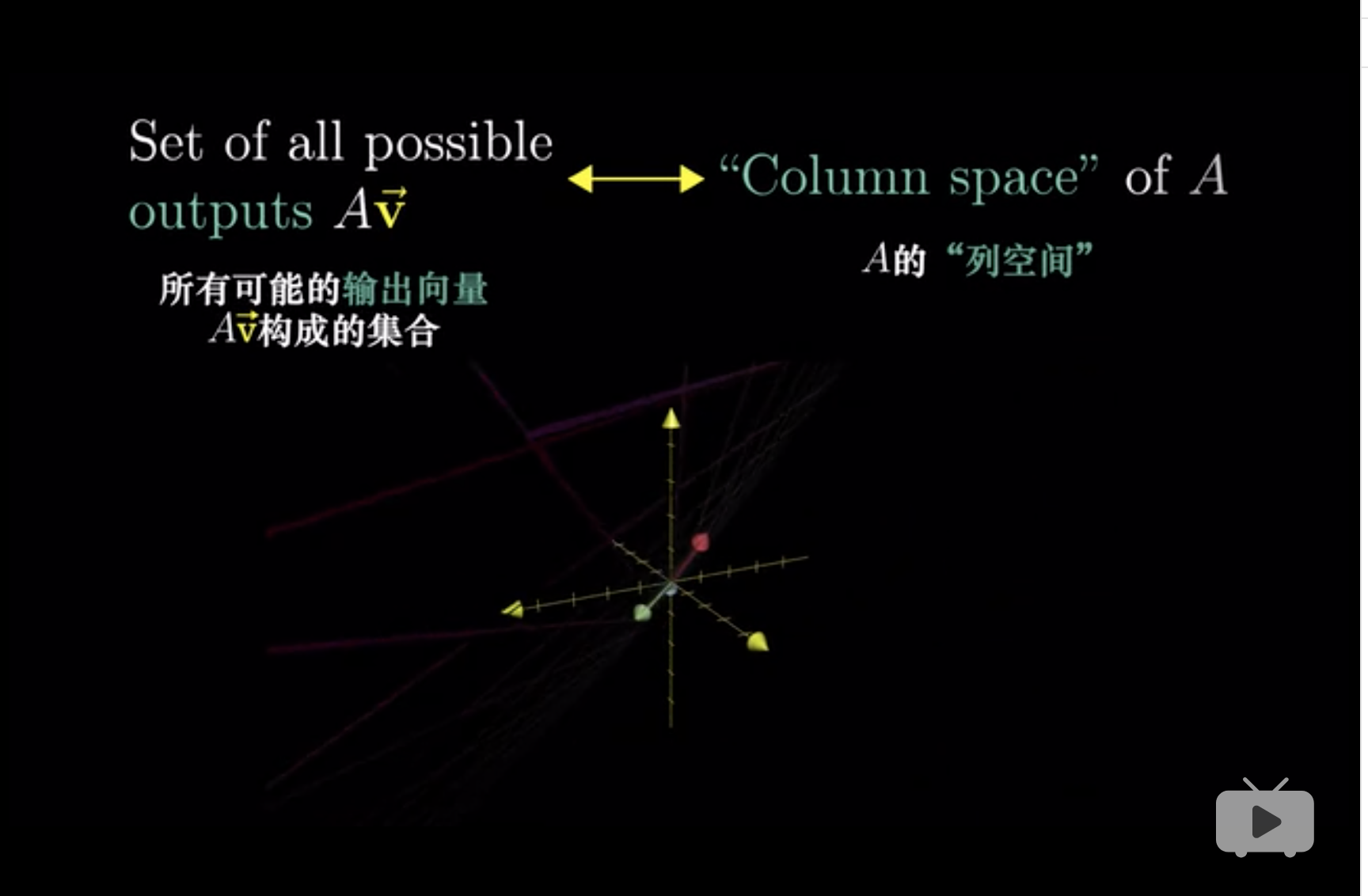
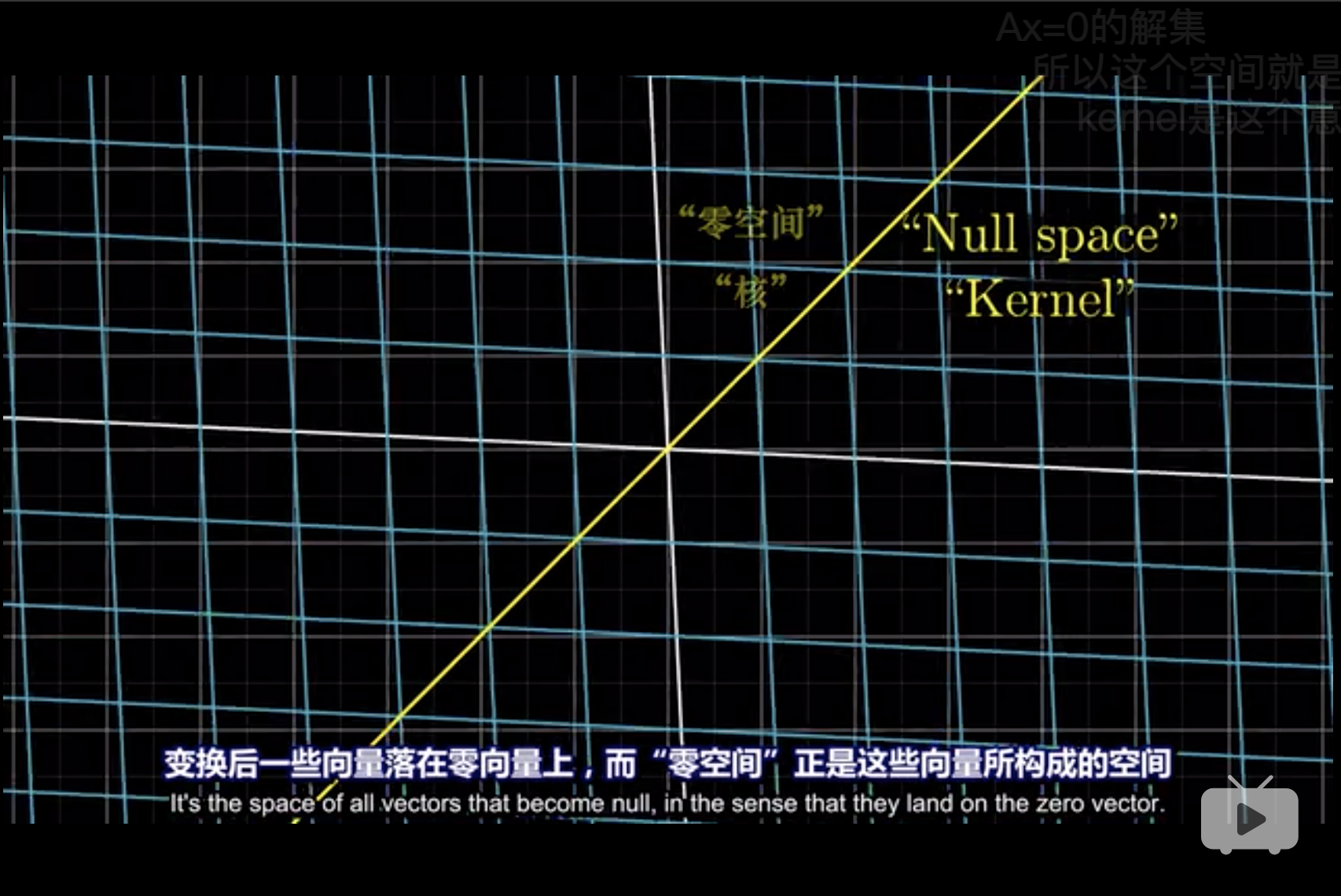
因此,那些被降维的向量,可以理解为某方向的分向量被压缩到了原点,这种操作的后果就是, null space or kernel。 被降维的向量的选择是具备条件的,比如PCA,就是解释方差小的向量被舍弃了。 (3Blue1Brown 2018, Edition 6)
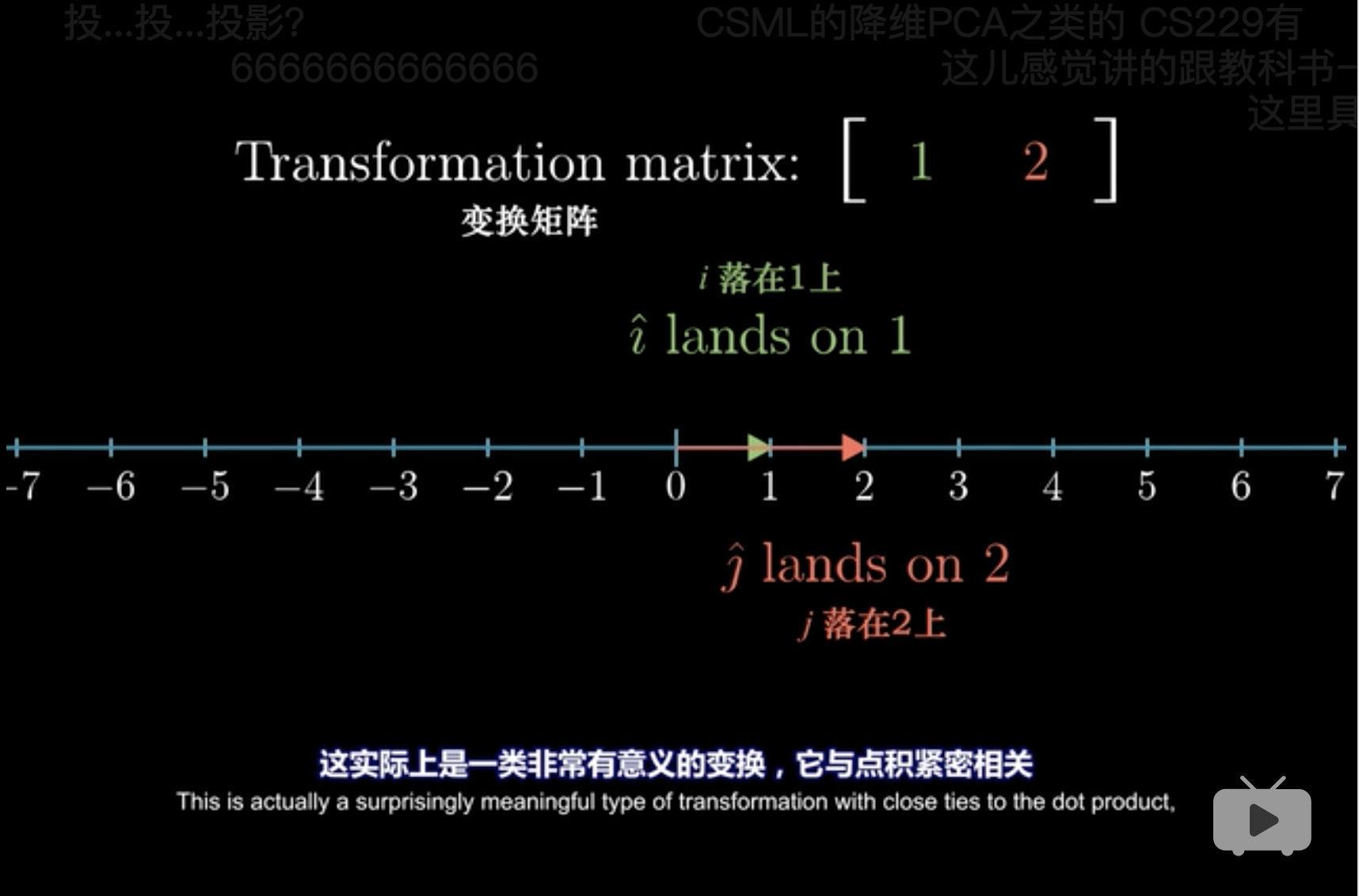
6 点积
从投影的理解方式看,
\[\vec{v}\cdot\vec{w}=|\vec{v}|\cdot|\vec{w}| \cdot \cos(\theta)\]
- 点积类似于\(\vec{w}\)向\(\vec{v}\)方向上的投影,计算为\(|\vec{w}| \cdot \cos(\theta)\)。
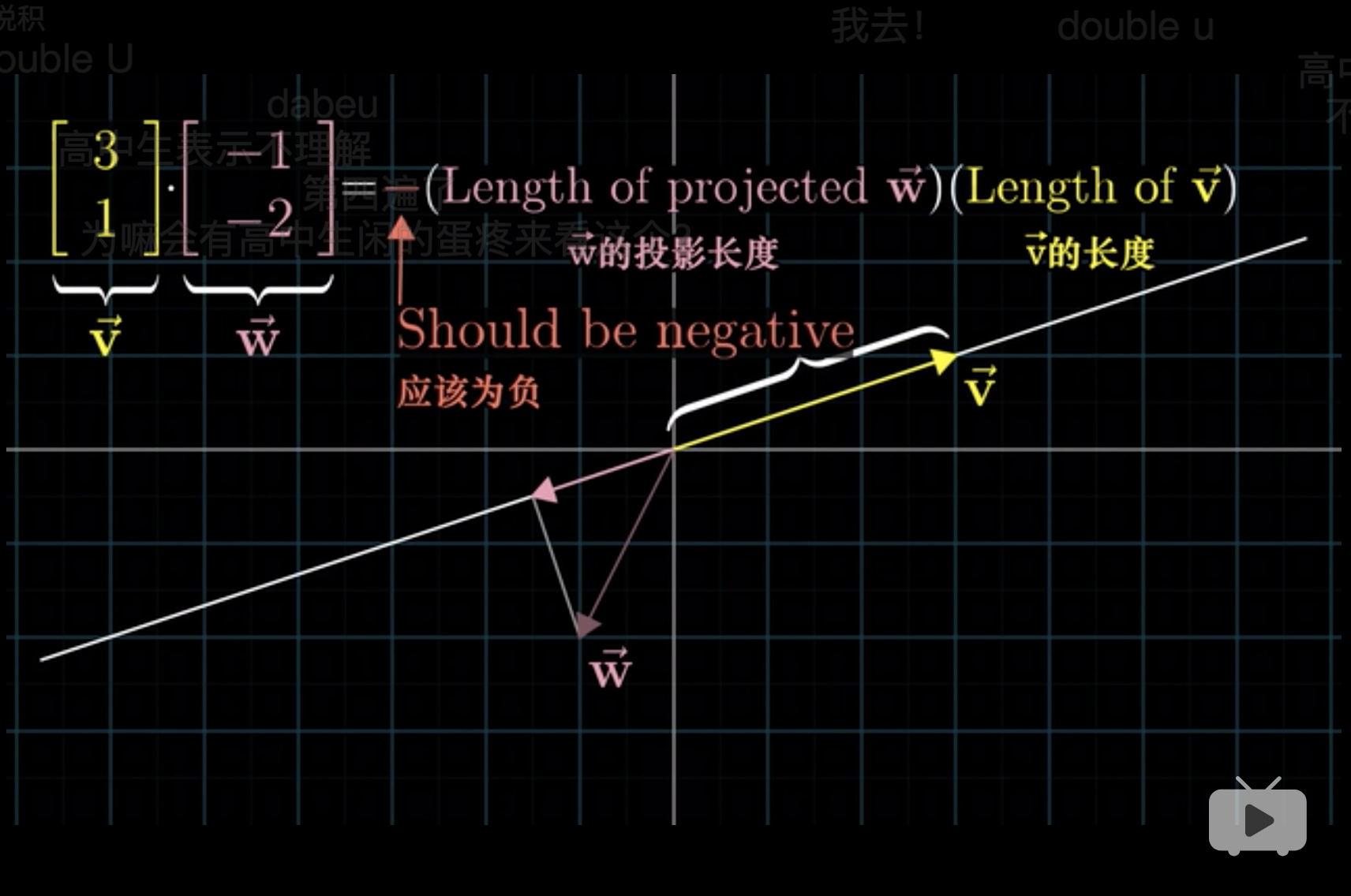
从几何的理解方式看,
从几何角度上,相当于先把\(\vec{w}\)压缩到\(\vec{v}\)上,原来二维空间的两个基被投影到了这条直线上了。
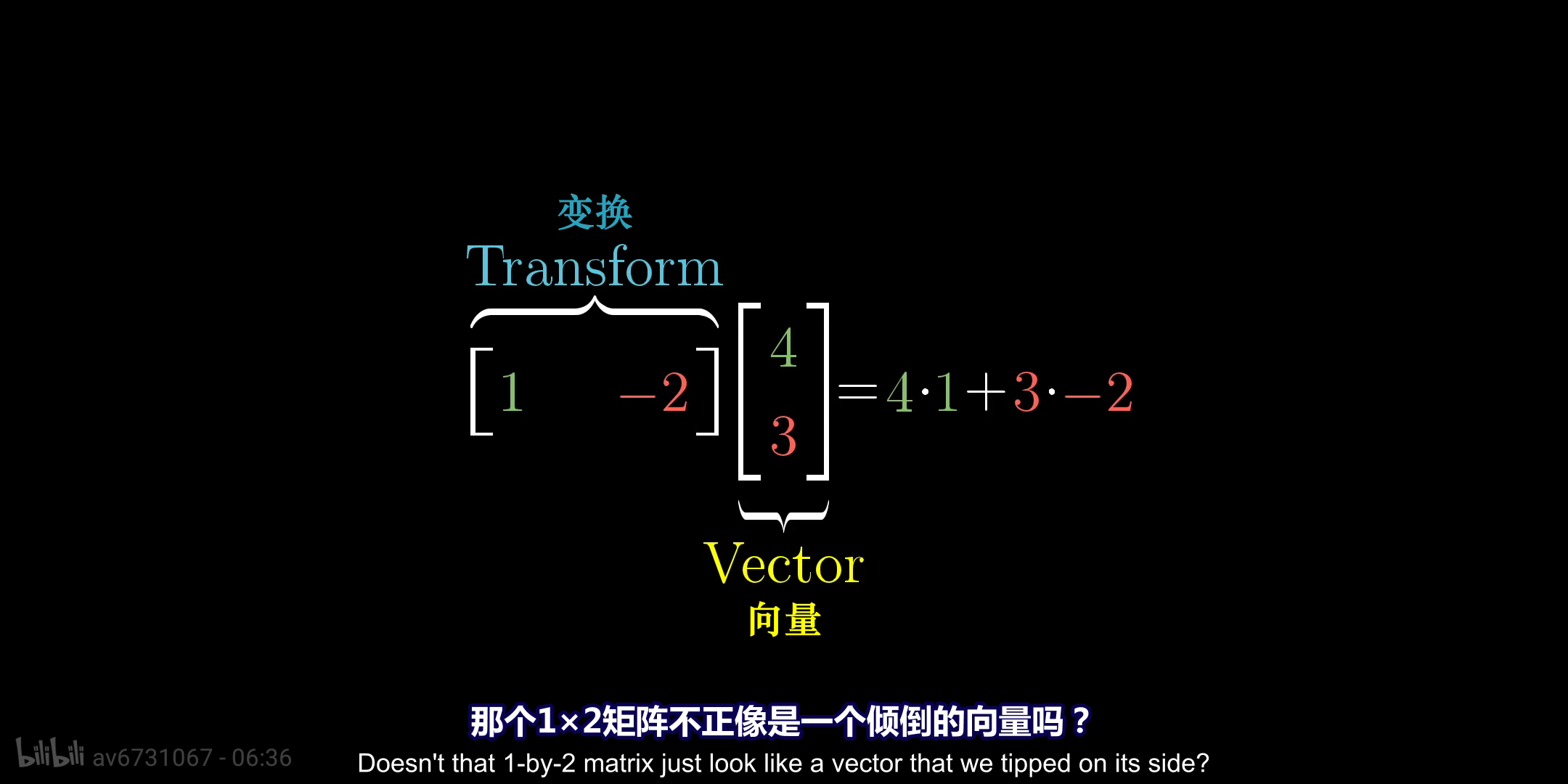
这种变换,也是靠线性变换完成的,假设 \(\begin{bmatrix}1&-2\end{bmatrix} \cdot \begin{bmatrix}4\\3\end{bmatrix}\), 可以认为\(\begin{bmatrix}1&-2\end{bmatrix}\)是变换矩阵 可以认为\(\begin{bmatrix}4\\3\end{bmatrix}\)是向量。 变换矩阵是拥有两个向量,但是都只有只有一维,因此完成了二维向一维的转换。 这就叫做对偶性。
## [,1] ## [1,] 3 ## [2,] 1## [,1] [,2] ## [1,] -1 -2## [,1] ## [1,] -5## [,1] ## [1,] -5这只是一种计算方式,主要是为了给出几何形象的理解,不必深究。
\(v \cdot w\)和\(w \cdot v\)一样,顺序无关。这是点积的一个性质,不受到矩阵运算的严格意义影响。 (3Blue1Brown 2018, Edition 7)
7 叉积
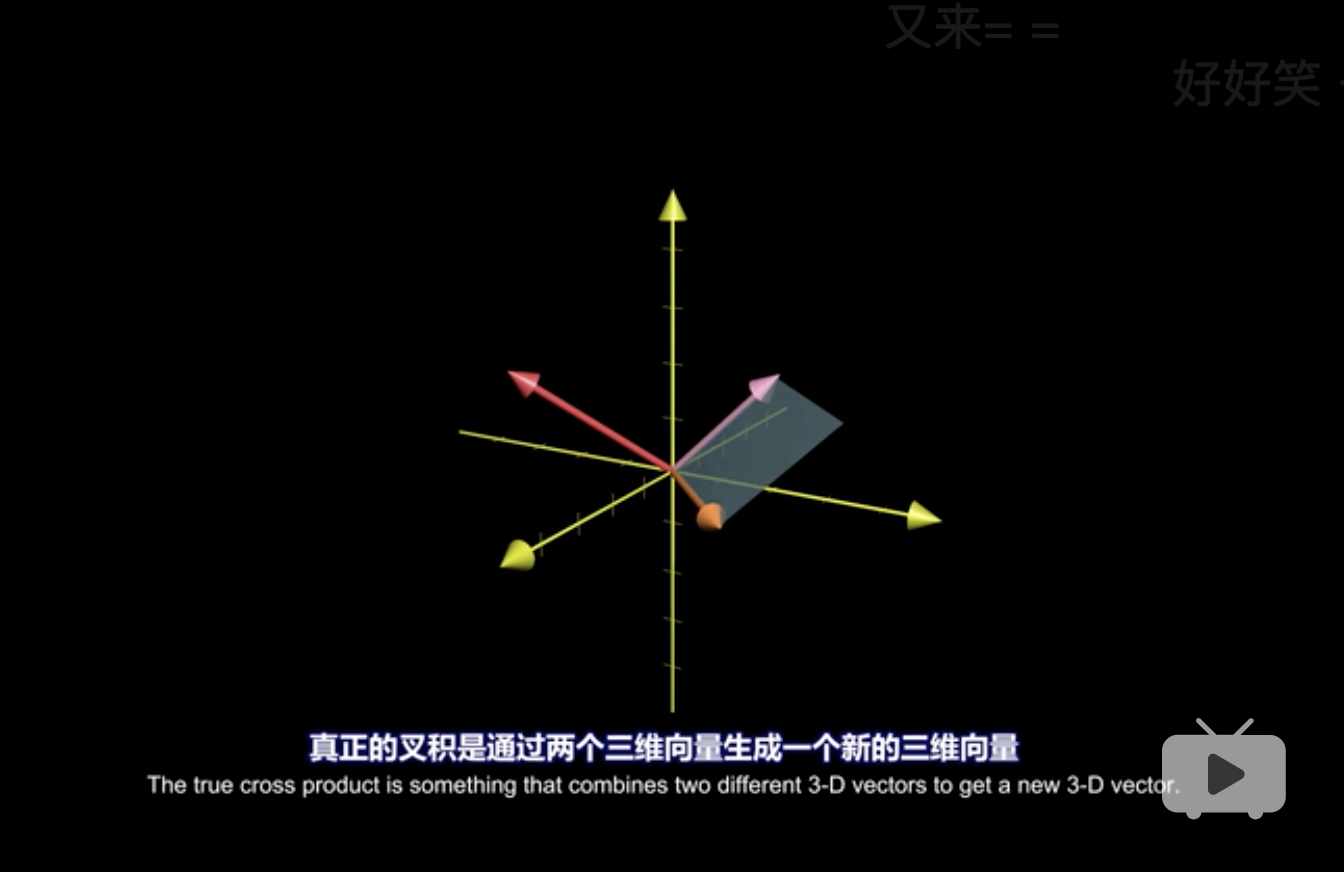
叉积产生后是一个向量。 由浅入深,将叉积分为长度和方向两块解释。 (3Blue1Brown 2018, Edition 8.1,Edition 8.2)
首先定义叉积的长度, 假设向量\(v\)和\(w\),
\[v \times w = \det([v,w])\]
叉积就是det。直观理解,就是面积,见 3。 当然因为方向不同,叉积可以为负1。
叉积的方向上,有两种方式确定,
右手定则。

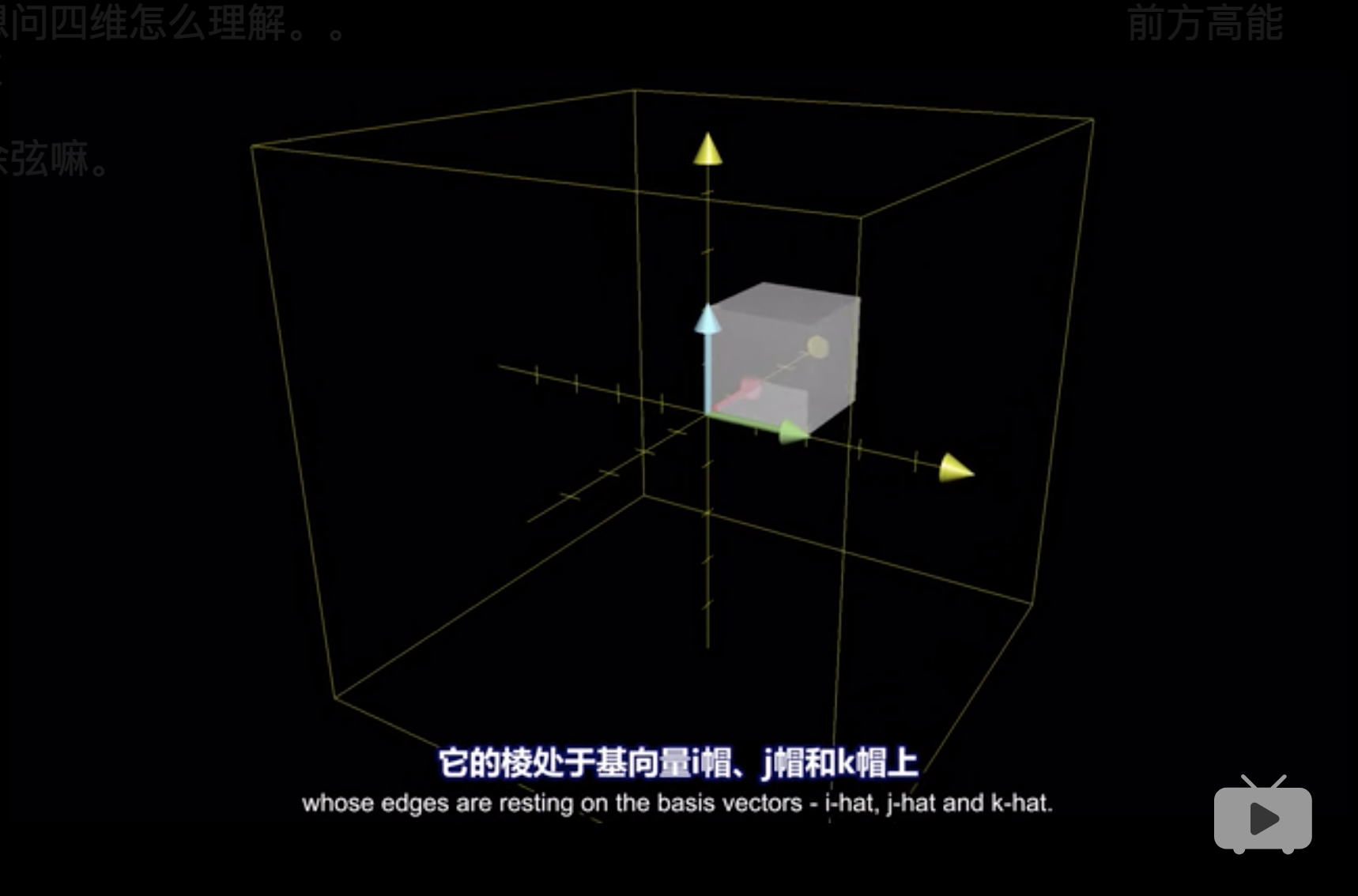
利用\(\det\)理解。 在一个三维空间中, 如果\(v \times w = \det([v,w])\)表示面积, 那么\(u \times v \times w = \det([u,v,w])\)表示体积,在三维空间中表示平行六面体。 其中\(u = \begin{bmatrix}x\\y\\z\end{bmatrix}\)。 并且我们发现,这个体积关于\(u\)是线性的。 \[\det\begin{bmatrix}x&v_1&w_1\\y&v_2&w_2\\z&v_3&w_3\\\end{bmatrix}=x\det\begin{bmatrix}v_2&w_2\\v_3&w_3\\\end{bmatrix}+y\det\begin{bmatrix}v_1&w_1\\v_3&w_3\\\end{bmatrix}+z\det\begin{bmatrix}v_1&w_1\\v_2&w_2\\\end{bmatrix}\] 其中各个\(\det\)都是固定值,因此这是线性。因此可以利用对偶性,见 6,构建一个矩阵将\(u\)从三维降到一维,假设这个矩阵为\(p = [p_1,p_2,p_3]\)。 因此满足, \[\begin{alignat}{2} [p_1,p_2,p_3]\begin{bmatrix}x\\y\\z\end{bmatrix} &= \det\begin{bmatrix}x&v_1&w_1\\y&v_2&w_2\\z&v_3&w_3\\\end{bmatrix} \\ x \cdot p_1 + y \cdot p_2 + z \cdot p_ 3 & = x\det\begin{bmatrix}v_2&w_2\\v_3&w_3\\\end{bmatrix}+ y\det\begin{bmatrix}v_1&w_1\\v_3&w_3\\\end{bmatrix}+ z\det\begin{bmatrix}v_1&w_1\\v_2&w_2\\\end{bmatrix} \\ \Rightarrow & \begin{cases} p_1 &= \det\begin{bmatrix}v_2&w_2\\v_3&w_3\\\end{bmatrix} \\ p_2 &= \det\begin{bmatrix}v_1&w_1\\v_3&w_3\\\end{bmatrix} \\ p_3 &= \det\begin{bmatrix}v_1&w_1\\v_2&w_2\\\end{bmatrix} \\ \end{cases} \\ \end{alignat}\] 并且根据点积的定义,见 6, \[\text{LHS} = p \cot u = |p| \cdot |u| \cdot \cos \theta\] 因此,LHS为\(u\)在\(p\)的投影\(|u| \cdot \cos \theta\)和\(p\)的乘积。 因此紧接着推导的关键之处, 体积处是向量\(v\)和\(w\)形成的面积乘以高,高是垂直于\(v\)和\(w\)形成的平面。 点积处是\(u\)在\(p\)的投影\(|u| \cdot \cos \theta\)和\(p\)的乘积。 因此向量\(p\)必须和高的方向一致,并且值为\(v\)和\(w\)形成的面积。 那么只有\(p = v \times w\)。
8 基变换
基变换的内容主要设计三方面, 假设有两个视角,A和B
- A视角的向量在B视角中的表达
- B视角的向量在A视角中的表达
- A视角的变换矩阵在B视角中的表达
现在我们假设有两个不同的视角,我和 Jennifer。
- 在 Jennifer 的视角里面,有一个向量 \(\vec{v} = \begin{bmatrix}-1\\2\end{bmatrix}\)
- 在我的视角,这个向量表示为 \(\vec{v} = \begin{bmatrix}-4\\1\end{bmatrix}\)。
- Jennifer 视角中的基\(\begin{bmatrix}1&0\\0&1\end{bmatrix}\)在我们的视角中为 \(i = \begin{bmatrix}2\\1\end{bmatrix}\) 和 \(j = \begin{bmatrix}-1\\1\end{bmatrix}\)
那么,这种视角的变换,只需要发生基变换可以完成(3Blue1Brown 2018, Edition 9)。以下是R代码的实现。
jennifer_mtr <-
matrix(
c(-1,2)
,nrow = 2
)
basic_vector_trans_mtr <-
matrix(
c(
c(2,1)
,c(-1,1)
)
,nrow = 2
,byrow = F
)
jennifer_mtr## [,1]
## [1,] -1
## [2,] 2## [,1] [,2]
## [1,] 2 -1
## [2,] 1 1## [,1]
## [1,] -4
## [2,] 1现在发生另外一种情况,
- 在我的视角里面,有一个向量 \(\vec{v} = \begin{bmatrix}3\\2\end{bmatrix}\)
- 因为我们的是标准正交基,因此表示为 coordinates \((3,2)\)2。
- 在 Jennifer 的视角,这个向量表示为 \(\vec{v} = \begin{bmatrix}\frac{5}{3}\\\frac{1}{3}\end{bmatrix}\)。
- Jennifer 视角中的基\(\begin{bmatrix}1&0\\0&1\end{bmatrix}\)在我们的视角中为 \(i = \begin{bmatrix}2\\1\end{bmatrix}\) 和 \(j = \begin{bmatrix}-1\\1\end{bmatrix}\)
me_mtr <-
matrix(
c(3,2)
,nrow = 2
)
basic_vector_trans_mtr <-
matrix(
c(
c(2,1)
,c(-1,1)
)
,nrow = 2
,byrow = F
)
me_mtr## [,1]
## [1,] 3
## [2,] 2## [,1] [,2]
## [1,] 2 -1
## [2,] 1 1## [,1]
## [1,] 1.6666667
## [2,] 0.3333333现在发生另外一种情况,
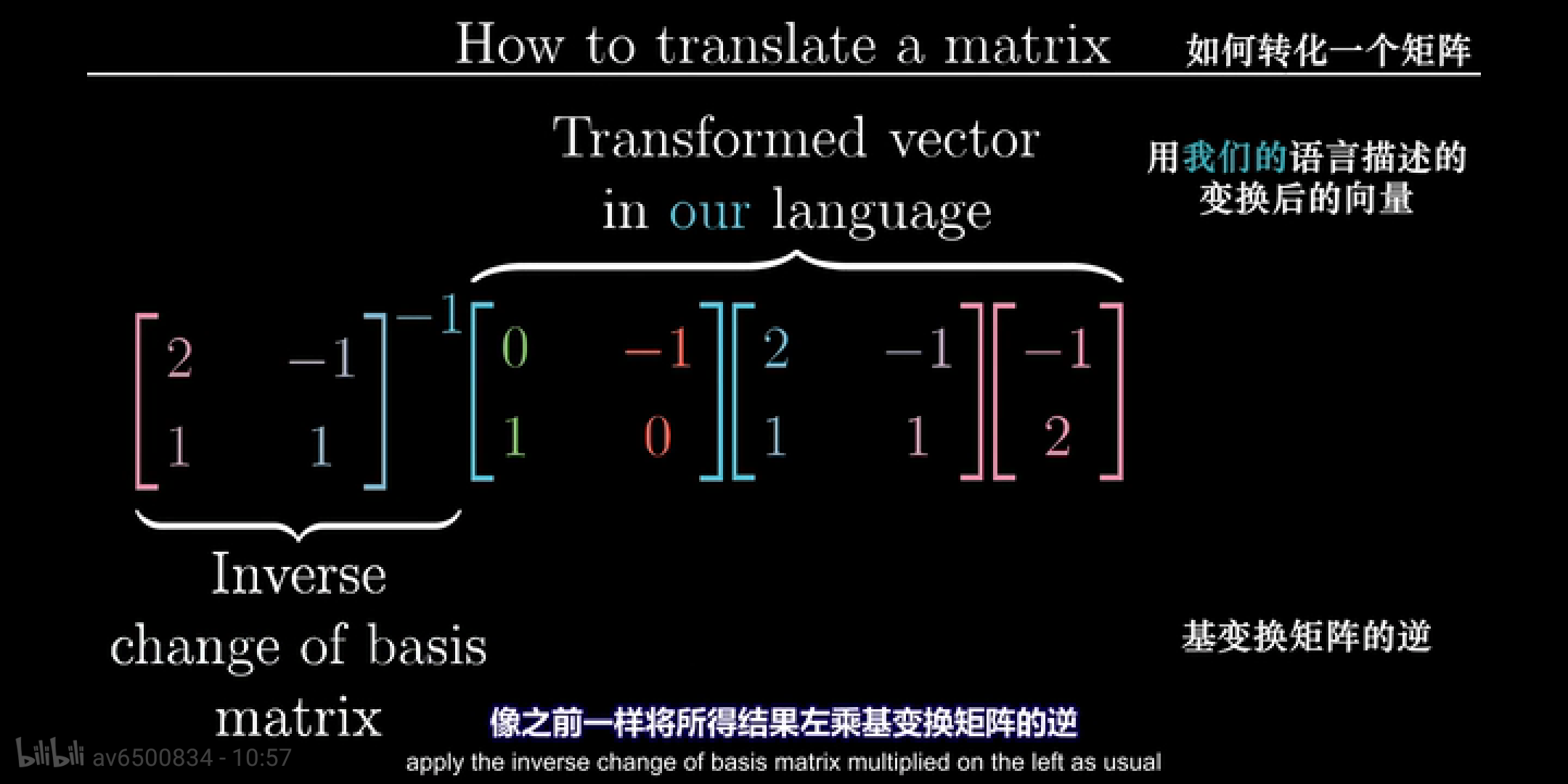
- 在我的视角里面,发生了旋转变换,矩阵表示为 \(\vec{A} = \begin{bmatrix}0&-1\\1&0\end{bmatrix}\)
- 我们知道这种旋转变换在 Jennifer 的视角如何表达
- Jennifer 视角中的基\(\begin{bmatrix}1&0\\0&1\end{bmatrix}\)在我们的视角中为 \(i = \begin{bmatrix}2\\1\end{bmatrix}\) 和 \(j = \begin{bmatrix}-1\\1\end{bmatrix}\)
- 便于理解的方式是在 Jennifer 的视角假设一个向量\(\vec{v} = \begin{bmatrix}-1\\2\end{bmatrix}\),经过我的视角的旋转变换后,查看在 Jennifer 视角的表达。
jennifer_mtr <-
matrix(
c(-1,2)
,nrow = 2
)
basic_vector_trans_mtr <-
matrix(
c(
c(2,1)
,c(-1,1)
)
,nrow = 2
,byrow = F
)
rotation_mtr <-
matrix(
c(
c(0,1)
,c(-1,0)
)
,nrow = 2
,byrow = F
)
solve(basic_vector_trans_mtr) %*%
rotation_mtr %*%
basic_vector_trans_mtr %*%
jennifer_mtr## [,1]
## [1,] -1.666667
## [2,] -2.333333注意这里的jennifer_mtr可以任意假设的,因此
旋转变换在 Jennifer 的视角的表达为
## [,1] [,2]
## [1,] 0.3333333 -0.6666667
## [2,] 1.6666667 -0.33333339 特征向量和特征值
9.1 特征向量和特征值定义
The word “eigen” is German for “own”. (Eager 2018)
因此,特征向量和特征值强调的是一种“自我”不变的特性。
从几何角度,
- 假设有一个二维平面,现在进行线性变换,见 1,使用矩阵\(\vec{A}\)。
- 假如这个平面存在一个向量\(\vec{v}\),在\(\vec{A}\)进行变换后,方向未发生变化 (180度变换也算未改变方向),那么我们认为\(\vec{v}\)是\(\vec{A}\)这次变换的一个特征向量。
- 当然这个向量经过线性变换后,长度大小会发生改变,相乘一个标量\(\lambda\),记作特征值。 (3Blue1Brown 2018, Edition 10)
An eigenvector is a scalar multiple of itself (“own”) when multiplied by A. (Eager 2018)
因此,当使用矩阵\(\vec{A}\)进行线性变换时,\(\vec{A}\)的特征向量\(\vec{v}\)只会进行使用标量进行变长变短,但是不会发生方向的改变。
用公式表示为
\[Av=\lambda v\]
其中\(v\)是特征向量, \(\lambda\)说、是特征值。
有一种特殊情况,在一个三维空间中,一个立方体,因为矩阵\(\vec{A}\)发生了旋转,那么旋转的轴就是特征向量。因为在这次变换中,旋转的轴没有发生方向变化,同时,\(\lambda=1\)。
9.2 跟空间压缩的关系
\[(A-\lambda I)v=0\]
- 更有意义的情况是,\(A-\lambda I\)变成了一个零向量。
- 因此,\(\det(A-\lambda I)=0\),
- 假设\(A=\begin{bmatrix}a&b\\c&d\\\end{bmatrix}\), 因此\(A-\lambda I=\begin{bmatrix}a-\lambda&b\\c&d-\lambda\\\end{bmatrix}\),
- 通过\(\lambda\)的变动,让\(\begin{bmatrix}b\\d\\\end{bmatrix}\)和 \(\begin{bmatrix}a\\c\\\end{bmatrix}\)这两个向量,靠拢,空间的压缩,最后实现重合。
9.3 \(\lambda\)的特殊情况
9.3.1 旋转矩阵
](../figure/transpose_matrix.gif)
Figure 9.1: 数据与算法之美
旋转矩阵 rotation matrix \(\vec{A}\)是没有特征根的,平面因为\(\vec{A}\)旋转后,没有一个变量是不发生方向变换的。 代数上,特征值和特征向量用复数表达。
例如,
## [,1] [,2]
## [1,] 0 -1
## [2,] 1 0## eigen() decomposition
## $values
## [1] 0+1i 0-1i
##
## $vectors
## [,1] [,2]
## [1,] 0.7071068+0.0000000i 0.7071068+0.0000000i
## [2,] 0.0000000-0.7071068i 0.0000000+0.7071068i## [,1] [,2]
## [1,] 0-1i -1+0i
## [2,] 1+0i 0-1i## [,1] [,2]
## [1,] 0+1i -1+0i
## [2,] 1+0i 0+1i## [,1] [,2]
## [1,] 0+0i 0.000000-1.414214i
## [2,] 0+0i 1.414214+0.000000i## [,1] [,2]
## [1,] 0.000000+1.414214i 0+0i
## [2,] 1.414214+0.000000i 0+0i# 两个都是零向量
# {(rotation_mtr - eigen(rotation_mtr)$values[1]*diag(2)) %*% eigen(rotation_mtr)$vectors} %>% det
# {(rotation_mtr - eigen(rotation_mtr)$values[2]*diag(2)) %*% eigen(rotation_mtr)$vectors} %>% det
# 'determinant' not currently defined for complex matrices代数上,
\[\begin{alignat}{2} (A-\lambda I)v&=0 \\ \det(A-\lambda I)&=0 \\ \begin{bmatrix} 0-\lambda&-1 \\ 1&0-\lambda \\ \end{bmatrix}&=0 \\ (-\lambda)^2-(-1)(1)&=0\\ \lambda^2+1=&0 \end{alignat}\]
9.3.2 剪切变换
剪切变换 shear matrix\(\vec{A}\)是只有唯一的特征根的,平面因为\(\vec{A}\)的一个向量发生旋转后,另一个向量保持原来的方向不变,因此这个向量就是特征向量,但是特征根是唯一的。
例如,
## [,1] [,2]
## [1,] 1 1
## [2,] 0 1## eigen() decomposition
## $values
## [1] 1 1
##
## $vectors
## [,1] [,2]
## [1,] 1 -1.000000e+00
## [2,] 0 2.220446e-16## [,1] [,2]
## [1,] 0 1
## [2,] 0 0## [,1] [,2]
## [1,] 0 1
## [2,] 0 0## [,1] [,2]
## [1,] 0 2.220446e-16
## [2,] 0 0.000000e+00## [,1] [,2]
## [1,] 0 2.220446e-16
## [2,] 0 0.000000e+00## [1] 0## [1] 0\[\begin{alignat}{2} (A-\lambda I)v&=0 \\ \det(A-\lambda I)&=0 \\ \begin{bmatrix} 1-\lambda&1 \\ 0&1-\lambda \\ \end{bmatrix}&=0 \\ (1-\lambda)^2-&=0\\ \lambda&=1 \end{alignat}\]
9.3.3 一个特征值有多个特征向量
如果\(Av=\lambda v\)存在, 那么\(A(2v)=\lambda (2v)\)存在,因此\(2v\)也是特征向量。
9.4 R实现
\[\begin{alignat}{2} (A-\lambda I)v&=0 \\ \end{alignat}\]
代码参考 Eager (2018 Chapter 3.10)。
## [,1] [,2]
## [1,] 1 2
## [2,] 3 4## eigen() decomposition
## $values
## [1] 5.3722813 -0.3722813
##
## $vectors
## [,1] [,2]
## [1,] -0.4159736 -0.8245648
## [2,] -0.9093767 0.5657675## [,1] [,2]
## [1,] -4.372281 2.000000
## [2,] 3.000000 -1.372281## [,1] [,2]
## [1,] 1.372281 2.000000
## [2,] 3.000000 4.372281## [,1] [,2]
## [1,] -2.220446e-16 4.736764
## [2,] 2.220446e-16 -3.250087## [,1] [,2]
## [1,] -2.389586 0
## [2,] -5.223971 0## [1] -3.301088e-16## [1] 0附录
9.5 三维空间中的线性变换
scale each basis vector. (3Blue1Brown 2018, 附注1)
与平面几何的理解类似,见 1。
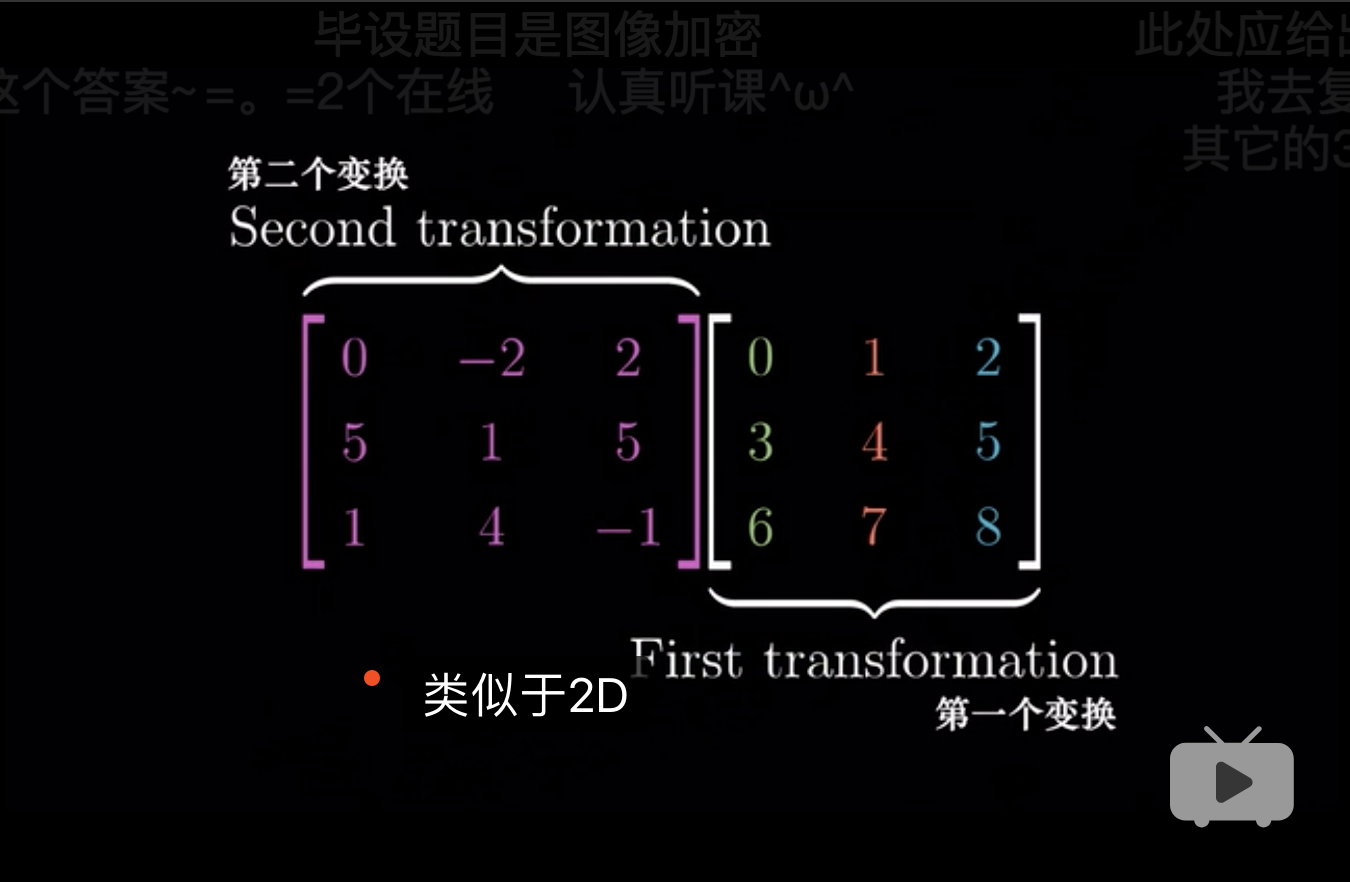
some_mtr <-
matrix(
c(0,-2,2,5,1,5,1,4,-1)
,nrow = 3
,byrow = T
)
basic_mtr <-
matrix(
0:8
,nrow = 3
,byrow = T
)
some_mtr## [,1] [,2] [,3]
## [1,] 0 -2 2
## [2,] 5 1 5
## [3,] 1 4 -1## [,1] [,2] [,3]
## [1,] 0 1 2
## [2,] 3 4 5
## [3,] 6 7 8## [,1]
## [1,] 0
## [2,] 5
## [3,] 1## [,1]
## [1,] 6
## [2,] 33
## [3,] 6## [,1]
## [1,] -2
## [2,] 1
## [3,] 4## [,1]
## [1,] 6
## [2,] 44
## [3,] 10## [,1]
## [1,] 2
## [2,] 5
## [3,] -1## [,1]
## [1,] 6
## [2,] 55
## [3,] 14## [,1] [,2] [,3]
## [1,] 0 -2 2
## [2,] 5 1 5
## [3,] 1 4 -1## [,1] [,2] [,3]
## [1,] 6 6 6
## [2,] 33 44 55
## [3,] 6 10 149.6 非方阵
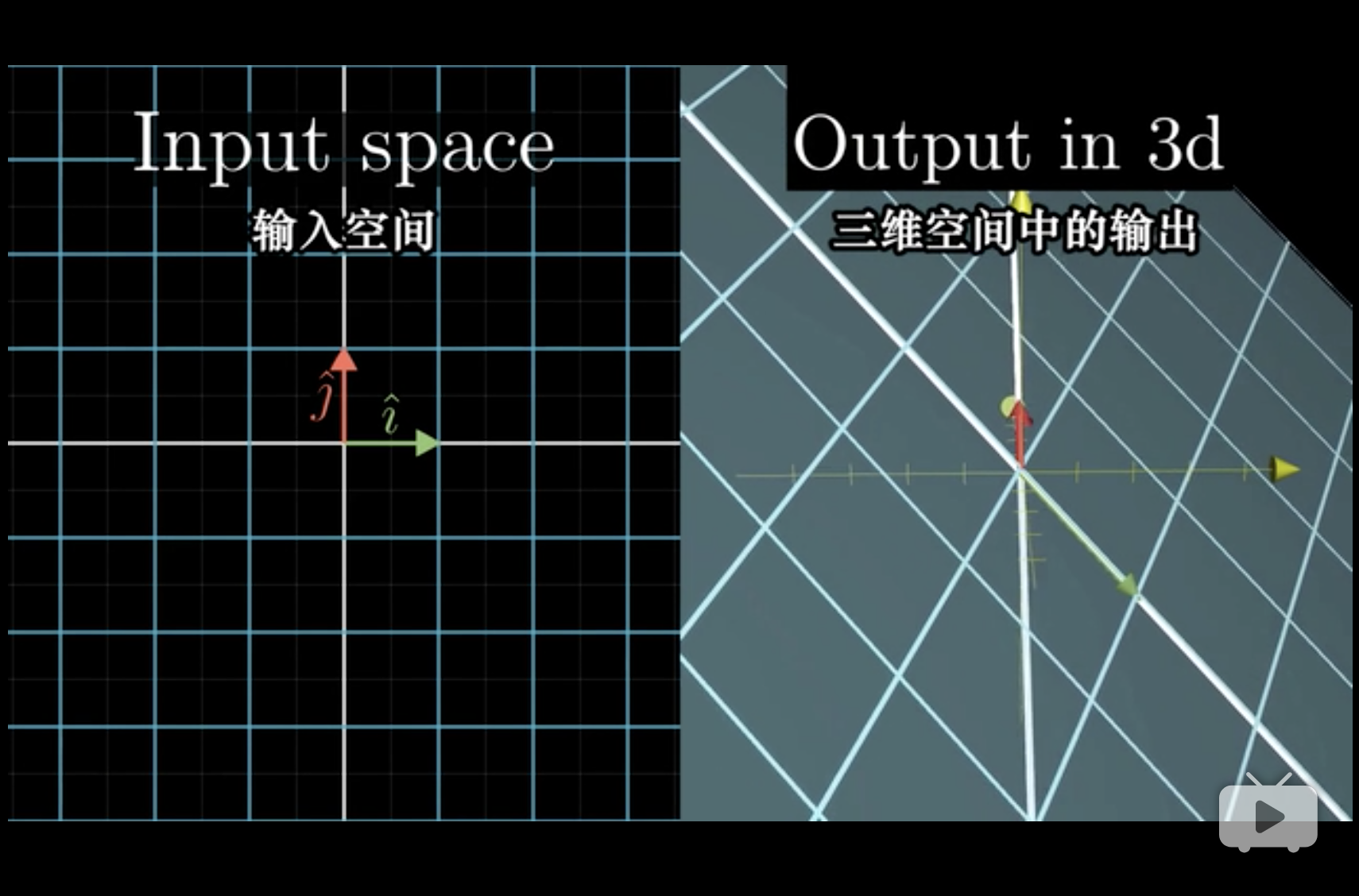
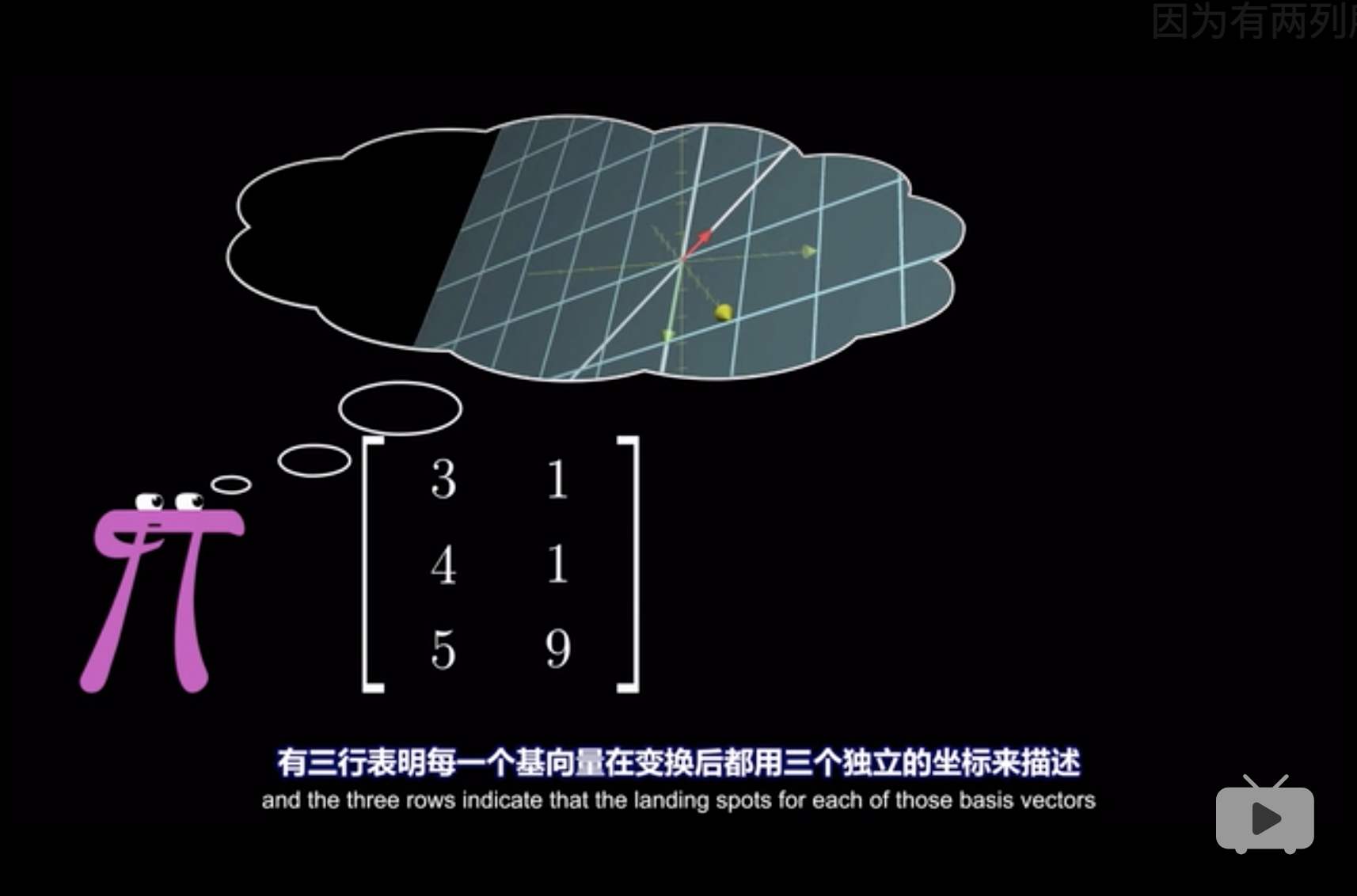
从几何上理解,有两种,
假设有一个向量,
## [,1] [,2]
## [1,] 3 1
## [2,] 4 1
## [3,] 5 9第一种非方阵表示, 两列表示两个基,三行表示三维。 在三维空间中,还是两个向量,虽然没有体积,但是是一个平面, 因为只有两个基,还有一个被压缩到了原点,零向量。 并且方向在三维空间中都有标志。 (3Blue1Brown 2018, 附注2)
被压缩到了原点的几何意义,见 5。
第二种非方阵表示, 两列表示二维,三行表示三个基。
平面上有三个基,但是显然平面是只需要两个的。

同理,两维降到一维,有两个基,那么就是一条线上,两个向量,可同向或者反向。
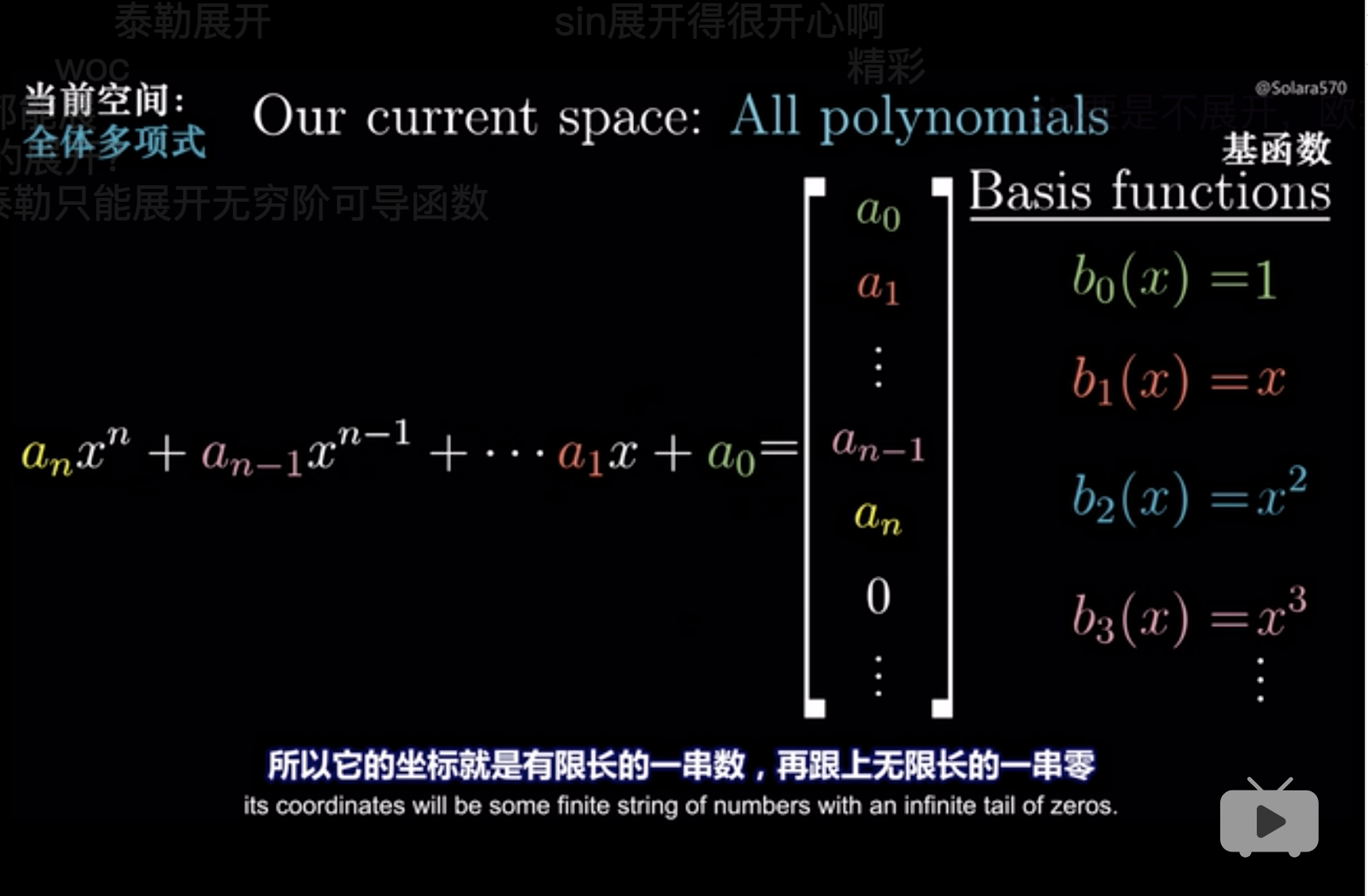
9.7 抽象、向量、函数
向量不仅仅是箭头和数字,它表示一切,满足可加性和放缩性的物质,就可以线性变换3。 (3Blue1Brown 2018, Edition 11)
可加性 (adding): \(f(x) +f(y) = f(x+y)\)
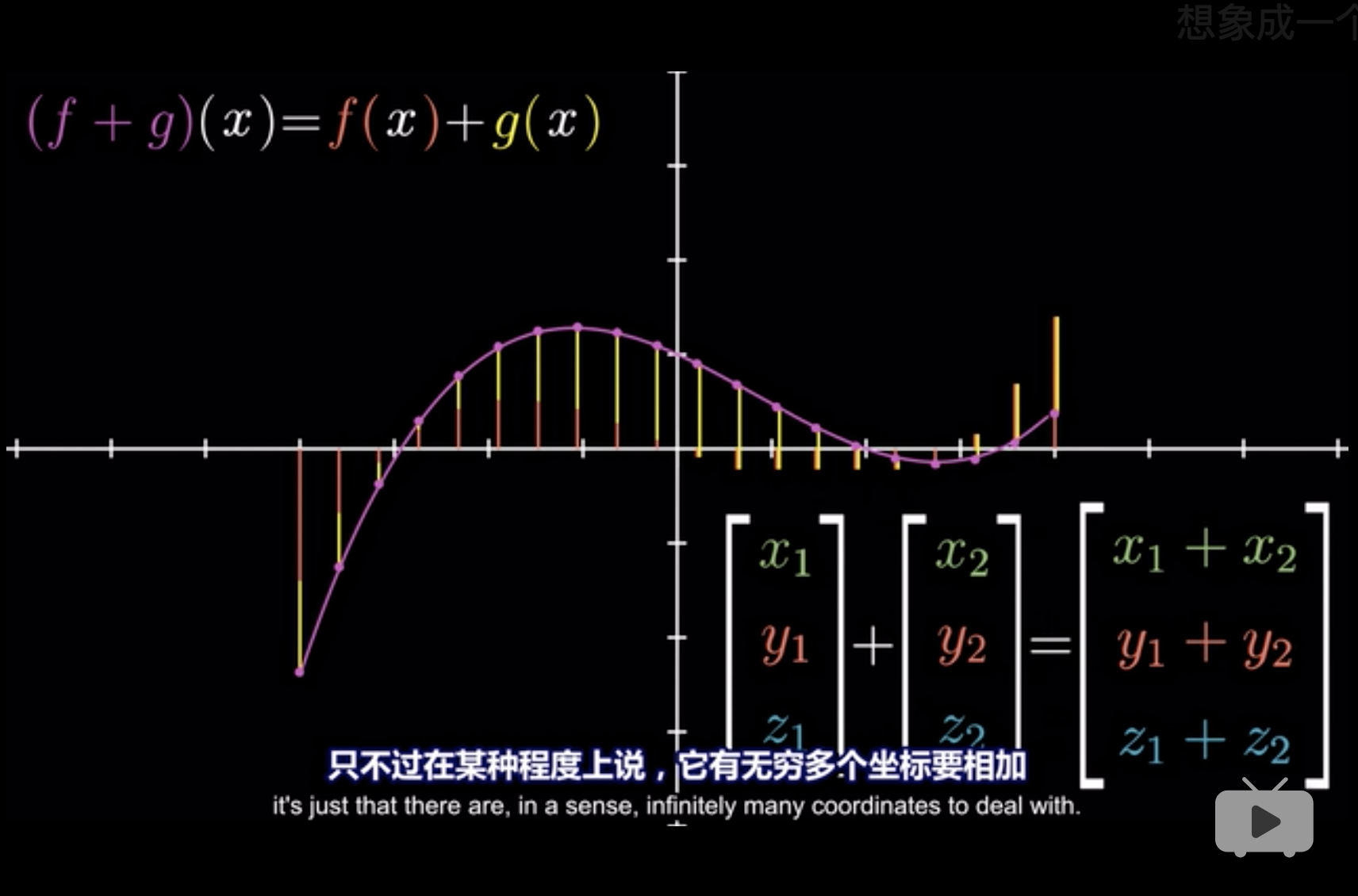
放缩性 (scaling): \(f(cx)=cf(x)\)
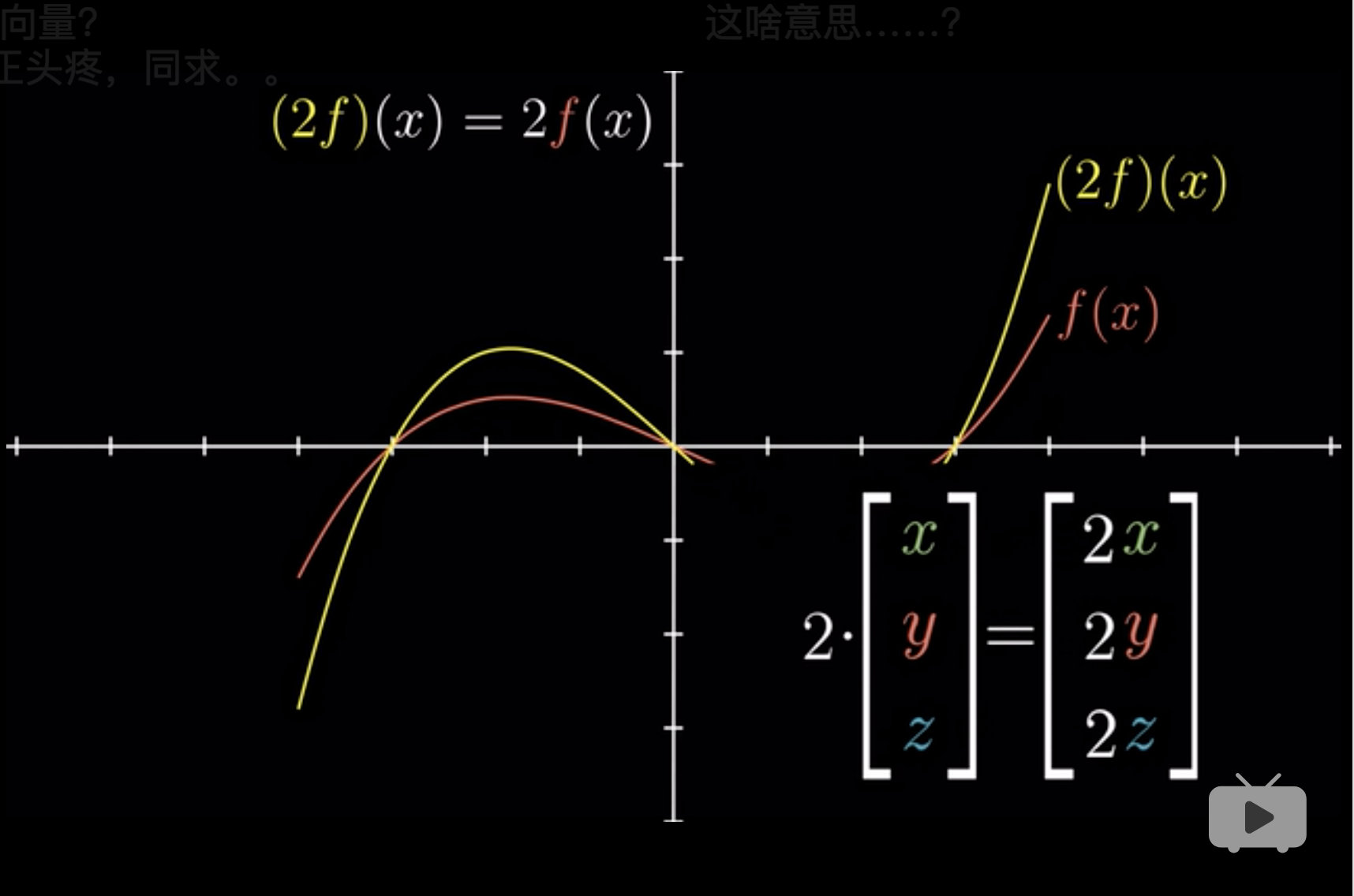
但是我们都知道,
Abstractness is the price of generality. (3Blue1Brown 2018, Edition 11)
抽象是普适的代价。 因此,在理解线性代数时,用网格线、几何来理解, 但是实际上,它不仅仅可用网格线,只要满足 可加性 和 放缩性 都可以适用。
多项式表达
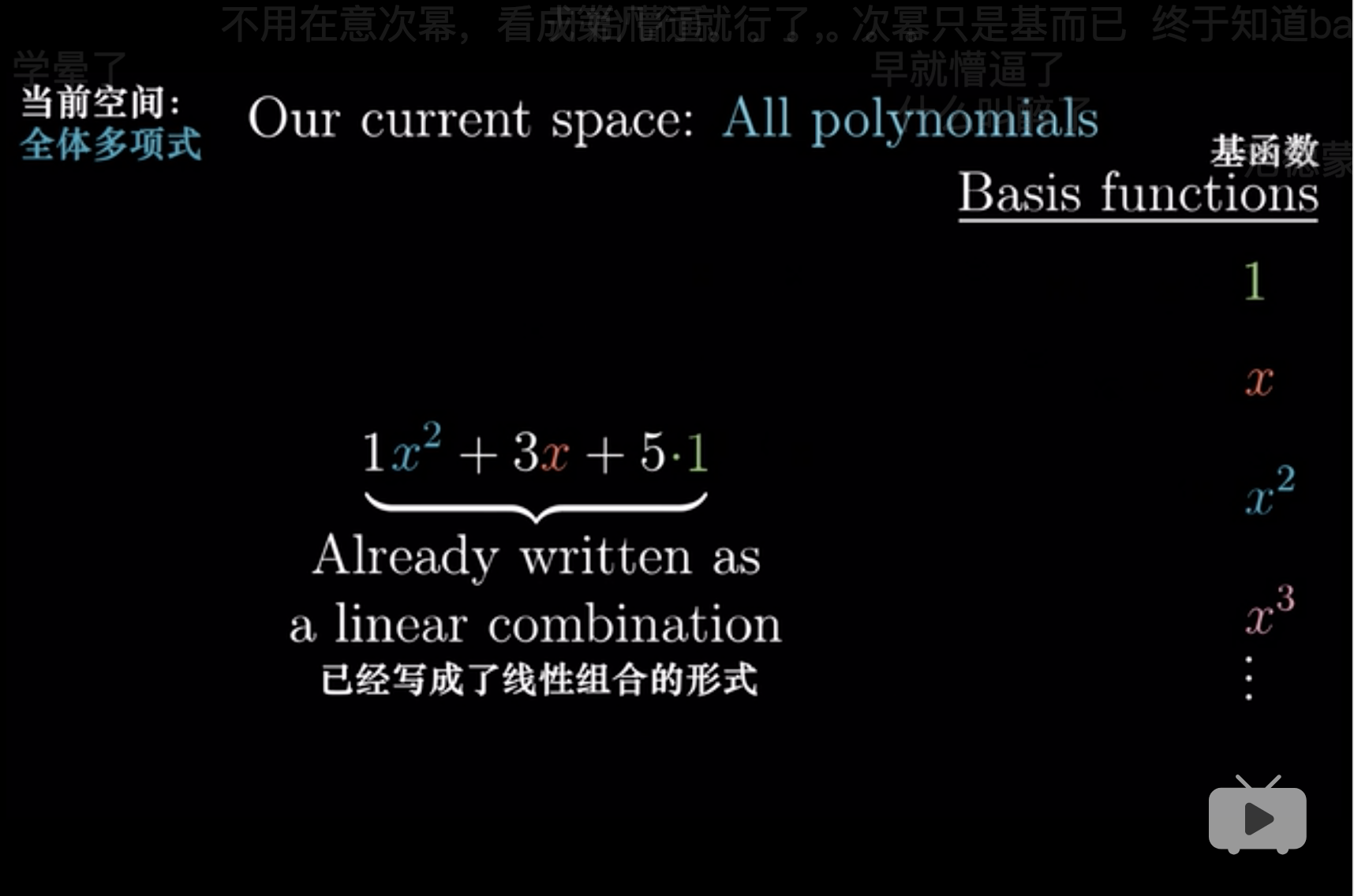
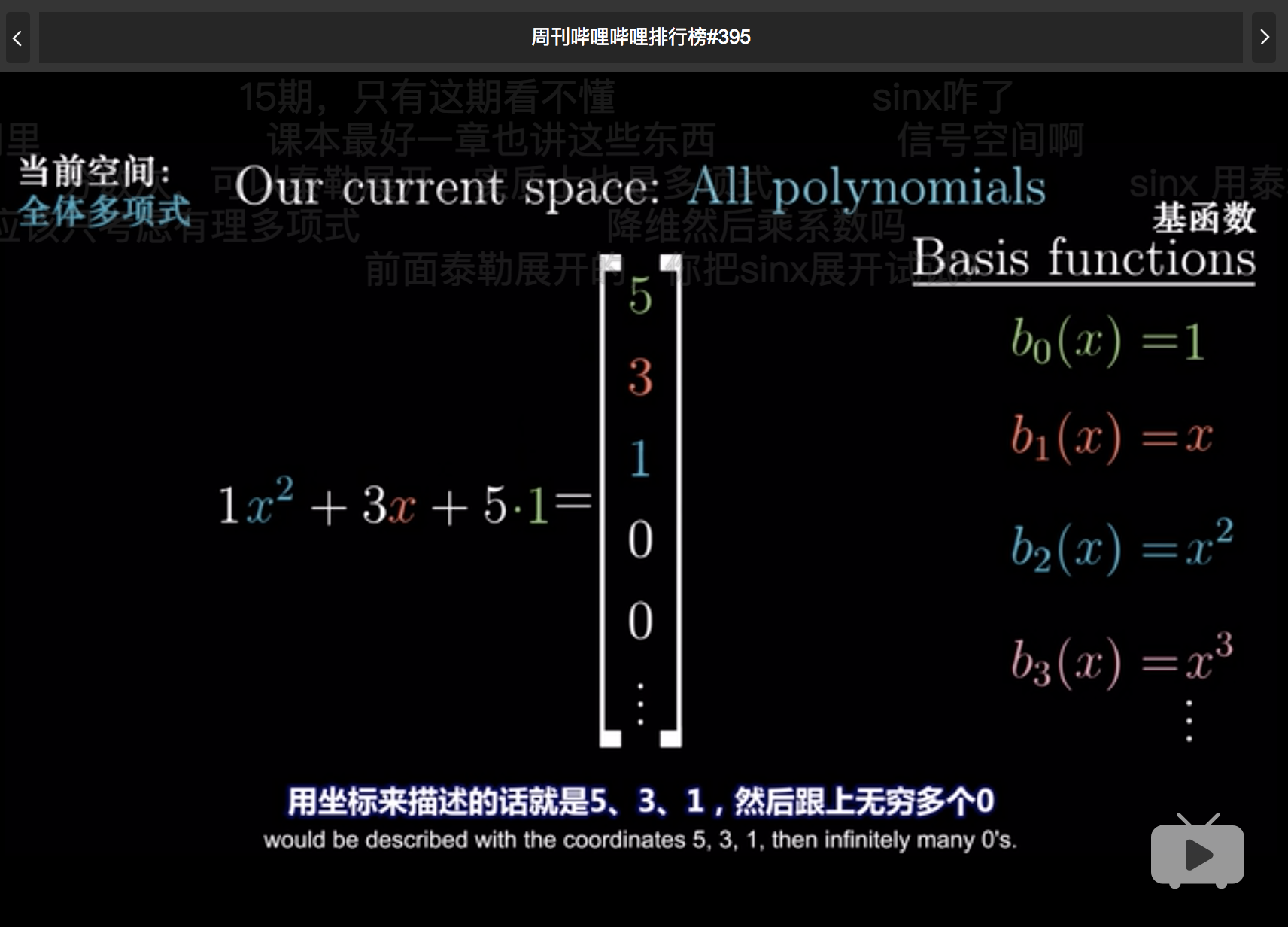
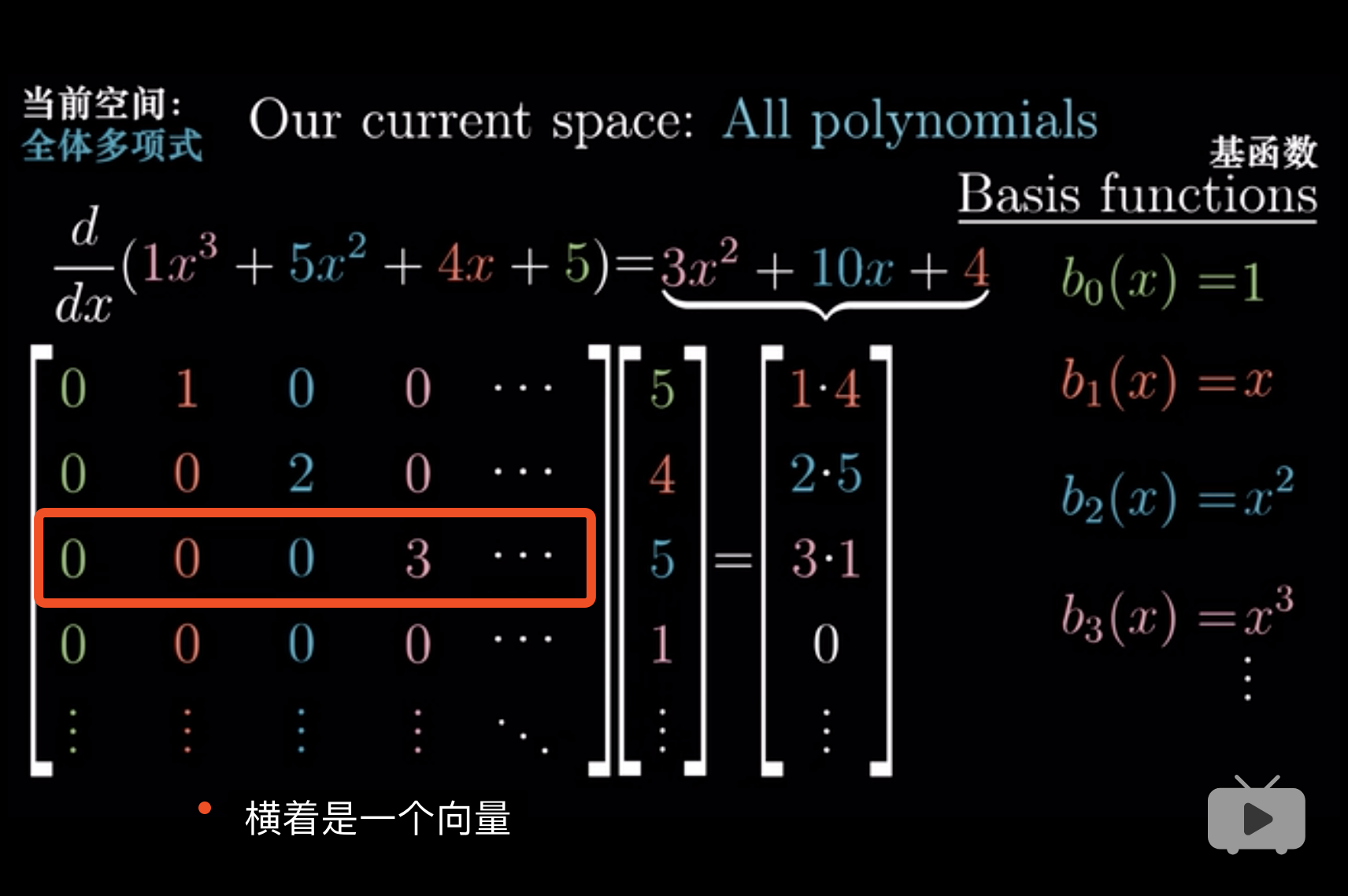
求导表达
9.8 Linear Algebra in R
9.8.1 元素计算
矩阵计算一般分两种
- Element-wise operations 元素计算
- Basic Matrix Operations 矩阵计算
## [,1] [,2] [,3] [,4] [,5]
## [1,] 1 2 3 4 5
## [2,] 6 7 8 9 10
## [3,] 11 12 13 14 15
## [4,] 16 17 18 19 20
## [5,] 21 22 23 24 25## [,1] [,2] [,3] [,4] [,5]
## [1,] 25 30 35 40 45
## [2,] 26 31 36 41 46
## [3,] 27 32 37 42 47
## [4,] 28 33 38 43 48
## [5,] 29 34 39 44 49## [,1] [,2] [,3] [,4] [,5]
## [1,] 0.0400000 0.06666667 0.08571429 0.1000000 0.1111111
## [2,] 0.2307692 0.22580645 0.22222222 0.2195122 0.2173913
## [3,] 0.4074074 0.37500000 0.35135135 0.3333333 0.3191489
## [4,] 0.5714286 0.51515152 0.47368421 0.4418605 0.4166667
## [5,] 0.7241379 0.64705882 0.58974359 0.5454545 0.5102041## [,1] [,2] [,3] [,4] [,5]
## [1,] 1.000000e+00 1.073742e+09 5.003155e+16 1.208926e+24 2.842171e+31
## [2,] 1.705817e+20 1.577754e+26 3.245186e+32 1.330279e+39 1.000000e+46
## [3,] 1.310999e+28 3.418219e+34 1.644008e+41 1.372074e+48 1.889249e+55
## [4,] 5.192297e+33 4.025450e+40 5.015973e+47 9.691809e+54 2.814750e+62
## [5,] 2.209833e+38 4.389056e+45 1.280518e+53 5.361603e+60 3.155444e+689.8.2 矩阵合并
参考 Wang et al. (2019) ,如模型的特征时常是需要 concat 的。 如
\[\boldsymbol{Y}=\sigma([\boldsymbol{X} \| \boldsymbol{G} \boldsymbol{X}] \boldsymbol{W})\]
表示 \(\boldsymbol{X}\) 和 \(\boldsymbol{G} \boldsymbol{X}\) 合并,\(\|\) 是连接符号。
## [,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10]
## [1,] 1 2 3 4 5 25 30 35 40 45
## [2,] 6 7 8 9 10 26 31 36 41 46
## [3,] 11 12 13 14 15 27 32 37 42 47
## [4,] 16 17 18 19 20 28 33 38 43 48
## [5,] 21 22 23 24 25 29 34 39 44 49## [,1] [,2] [,3] [,4] [,5]
## [1,] 1 2 3 4 5
## [2,] 6 7 8 9 10
## [3,] 11 12 13 14 15
## [4,] 16 17 18 19 20
## [5,] 21 22 23 24 25
## [6,] 25 30 35 40 45
## [7,] 26 31 36 41 46
## [8,] 27 32 37 42 47
## [9,] 28 33 38 43 48
## [10,] 29 34 39 44 499.8.3 Basic Calculation
## [1] 1 2 3 4 5 6 7## [1] 2 3 4 5 6 7 8## [1] 2 6 12 20 30 42 56## [1] 2 3 4 5 6 7 8- 类似于
data.frame里面的相乘。 longer object length is not a multiple of shorter object length说明,最后R自动修改了z为7的长度。
## [,1] [,2]
## [1,] 1 1
## [2,] 1 1
## [3,] 1 1## [,1] [,2]
## [1,] -1 -1
## [2,] -1 -1
## [3,] -1 -1## [,1] [,2]
## [1,] 0 0
## [2,] 0 0
## [3,] 0 0## [,1] [,2] [,3]
## [1,] -2 -2 -2
## [2,] -2 -2 -2
## [3,] -2 -2 -2## [,1] [,2]
## [1,] 1 4
## [2,] 9 16## [,1] [,2]
## [1,] 7 10
## [2,] 15 22## [,1] [,2]
## [1,] 1 0
## [2,] 0 1## [,1] [,2]
## [1,] 1 0
## [2,] 0 1## [,1] [,2]
## [1,] 1 0
## [2,] 0 19.8.4 Inverse Matrix
A <- matrix(c(1,2,-1,2),nrow = 2,byrow = T)
# Take the inverse of the 2 by 2 identity matrix
solve(diag(2))## [,1] [,2]
## [1,] 1 0
## [2,] 0 1# Take the inverse of the matrix A
Ainv <- solve(A)
# Multiply A by its inverse on the left
Ainv%*%A## [,1] [,2]
## [1,] 1 0
## [2,] 0 1## [,1] [,2]
## [1,] 1 0
## [2,] 0 1对于非方阵,见 9.6,MASS包可以处理。
(Eager 2018, Chapter 3.1)
## [,1] [,2]
## [1,] 2 3
## [2,] -1 4
## [3,] 1 7## [,1] [,2] [,3]
## [1,] 0.3333333 -0.30303030 0.03030303
## [2,] 0.0000000 0.09090909 0.09090909## [,1] [,2]
## [1,] 1 -1.110223e-16
## [2,] 0 1.000000e+009.8.5 matrix manipulation
M <- diag(12)
M[M==0] <- -1
# Add a row of 1's
M <- rbind(M, rep(1, 12))
# Add a column of -1's
M <- cbind(M, rep(-1, 13))
# Change the element in the lower-right corner of the matrix M
M[13, 13] <- 1
# Print M
print(M)## [,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10] [,11] [,12] [,13]
## [1,] 1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1
## [2,] -1 1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1
## [3,] -1 -1 1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1
## [4,] -1 -1 -1 1 -1 -1 -1 -1 -1 -1 -1 -1 -1
## [5,] -1 -1 -1 -1 1 -1 -1 -1 -1 -1 -1 -1 -1
## [6,] -1 -1 -1 -1 -1 1 -1 -1 -1 -1 -1 -1 -1
## [7,] -1 -1 -1 -1 -1 -1 1 -1 -1 -1 -1 -1 -1
## [8,] -1 -1 -1 -1 -1 -1 -1 1 -1 -1 -1 -1 -1
## [9,] -1 -1 -1 -1 -1 -1 -1 -1 1 -1 -1 -1 -1
## [10,] -1 -1 -1 -1 -1 -1 -1 -1 -1 1 -1 -1 -1
## [11,] -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 1 -1 -1
## [12,] -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 1 -1
## [13,] 1 1 1 1 1 1 1 1 1 1 1 1 1## [,1] [,2] [,3] [,4] [,5] [,6] [,7] [,8] [,9] [,10] [,11] [,12] [,13]
## [1,] 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5
## [2,] 0.0 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5
## [3,] 0.0 0.0 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5
## [4,] 0.0 0.0 0.0 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5
## [5,] 0.0 0.0 0.0 0.0 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5
## [6,] 0.0 0.0 0.0 0.0 0.0 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.5
## [7,] 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.0 0.0 0.0 0.0 0.0 0.5
## [8,] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.0 0.0 0.0 0.0 0.5
## [9,] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.0 0.0 0.0 0.5
## [10,] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.0 0.0 0.5
## [11,] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.0 0.5
## [12,] 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.5
## [13,] -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -0.5 -5.0\[M \times \text{rating} = f\]
M <- fread('../../picbackup/WNBA_Data_2017_M.csv')
f <- fread('../../picbackup/WNBA_Data_2017_f.csv')M_mtr <- M %>% as.matrix # has column name
f_mtr <- f %>% as.matrix # has column name
solve(M_mtr)%*%f_mtr # with M's column name and f's column name## Differential
## Atlanta -4.012938e+00
## Chicago -5.156260e+00
## Connecticut 4.309525e+00
## Dallas -2.608129e+00
## Indiana -8.532958e+00
## Los Angeles 7.850327e+00
## Minnesota 1.061241e+01
## New York 2.541565e+00
## Phoenix 8.979110e-01
## San Antonio -6.181574e+00
## Seattle -2.666953e-01
## Washington 5.468121e-01
## WNBA 1.043610e-149.8.6 Eigen*
主要使用函数eigen(Eager 2018, Chapter 3.6)
## [,1] [,2] [,3]
## [1,] -1 2 4
## [2,] 0 7 12
## [3,] 0 0 -4Eigen_mtr <-
matrix(
c(
c(0.2425356, 0.9701425, 0)
,c(-0.3789810, -0.6821657, 0.6253186)
,c(1,0,0)
)
,nrow = 3
,byrow = T
)
Eigen_mtr## [,1] [,2] [,3]
## [1,] 0.2425356 0.9701425 0.0000000
## [2,] -0.3789810 -0.6821657 0.6253186
## [3,] 1.0000000 0.0000000 0.0000000## [,1]
## [1,] 2e-07
## [2,] 0e+00
## [3,] 0e+00# Show that -4 is an eigenvalue for A
A%*%c(-0.3789810, -0.6821657, 0.6253186) - (-4)*c(-0.3789810, -0.6821657, 0.6253186)## [,1]
## [1,] -2.220446e-16
## [2,] 5.000000e-07
## [3,] 0.000000e+00## [,1]
## [1,] 0
## [2,] 0
## [3,] 0For the first eigenpair in the previous problem, show that double and half of the eigenvector used is still an eigenvector for the given eigenvalue. (Eager 2018, Chapter 3)
# Show that double an eigenvector is still an eigenvector
A%*%((2)*c(0.2425356, 0.9701425, 0)) - 7*(2)*c(0.2425356, 0.9701425, 0)## [,1]
## [1,] 4e-07
## [2,] 0e+00
## [3,] 0e+00# Show half of an eigenvector is still an eigenvector
A%*%((0.5)*c(0.2425356, 0.9701425, 0)) - 7*(0.5)*c(0.2425356, 0.9701425, 0)## [,1]
## [1,] 1e-07
## [2,] 0e+00
## [3,] 0e+00Show that, for each eigenvalue lambda (λ), that the determinant of \(\lambda I - A\) is equal to zero. (Eager 2018)
A <- matrix(c(1,2,1,1),nrow = 2,byrow = 2)
# Compute the eigenvalues of A and store in Lambda
Lambda <- eigen(A)
# Print eigenvalues
print(Lambda$values[1])## [1] 2.414214## [1] -0.4142136# Verify that these numbers satisfy the conditions of being an eigenvalue
det(Lambda$values[1]*diag(2) - A)## [1] -3.140185e-16## [1] -3.140185e-16\[A \cdot v = \lambda \cdot v\]
# Find the eigenvectors of A and store them in Lambda
Lambda <- eigen(A)
# Print eigenvectors
print(Lambda$vectors[, 1])## [1] 0.8164966 0.5773503## [1] -0.8164966 0.5773503# Verify that these eigenvectors & their associated eigenvalues satisfy Av - lambda v = 0
Lambda$values[1]*Lambda$vectors[, 1] - A%*%Lambda$vectors[, 1]## [,1]
## [1,] 0
## [2,] 0## [,1]
## [1,] -1.110223e-16
## [2,] 8.326673e-179.8.7 Cases in Markov Models
M是 Markov matrix
(Eager 2018, Chapter 3.14)
M <- matrix(
c(
c(0.980, 0.005, 0.005, 0.010)
,c(0.005, 0.980, 0.010, 0.005)
,c(0.005, 0.010, 0.980, 0.005)
,c(0.010, 0.005, 0.005, 0.980)
)
,nrow = 4
,byrow = T
)## [,1] [,2] [,3] [,4]
## [1,] 0.980 0.005 0.005 0.010
## [2,] 0.005 0.980 0.010 0.005
## [3,] 0.005 0.010 0.980 0.005
## [4,] 0.010 0.005 0.005 0.980## [,1] [,2] [,3] [,4]
## [1,] 0.25 0.25 0.25 0.25
## [2,] 0.25 0.25 0.25 0.25
## [3,] 0.25 0.25 0.25 0.25
## [4,] 0.25 0.25 0.25 0.25## [,1] [,2] [,3] [,4]
## [1,] 0.25 0.25 0.25 0.25
## [2,] 0.25 0.25 0.25 0.25
## [3,] 0.25 0.25 0.25 0.25
## [4,] 0.25 0.25 0.25 0.25- 可以发现矩阵进行>1000次后,所有元素变成0.25
# This code iterates mutation 100 times
x <- c(1, 0, 0, 0)
for (j in 1:1000) {x <- M%*%x}
# Print x
x## [,1]
## [1,] 0.25
## [2,] 0.25
## [3,] 0.25
## [4,] 0.25## [,1]
## [1,] 0.25
## [2,] 0.25
## [3,] 0.25
## [4,] 0.25# Print and scale the first eigenvector of M
Lambda <- eigen(M)
v1 <- Lambda$vectors[, 1]/sum(Lambda$vectors[, 1])
print(v1)## [1] 0.25 0.25 0.25 0.259.8.8 Cases in PCA
# Extract columns 5-12 of combine
A <- combine[, 5:12]
# Make A into a matrix
A <- as.matrix(A)
# Subtract the mean of all columns
A[, 1] <- A[, 1] - mean(A[, 1])
A[, 2] <- A[, 2] - mean(A[, 2])
A[, 3] <- A[, 3] - mean(A[, 3])
A[, 4] <- A[, 4] - mean(A[, 4])
A[, 5] <- A[, 5] - mean(A[, 5])
A[, 6] <- A[, 6] - mean(A[, 6])
A[, 7] <- A[, 7] - mean(A[, 7])
A[, 8] <- A[, 8] - mean(A[, 8])
A %>% head## height weight forty vertical bench broad_jump
## [1,] -2.992720971 -60.087348 -0.43158406 2.401733 -7.091854 13.8097054
## [2,] -0.992720971 45.912652 0.52841594 -6.098267 5.908146 -14.1902946
## [3,] 3.007279029 3.912652 -0.14158406 -1.598267 -4.091854 -0.1902946
## [4,] 0.007279029 -54.087348 -0.47158406 8.401733 -5.091854 17.8097054
## [5,] 2.007279029 4.912652 0.05841594 -2.598267 -1.091854 4.8097054
## [6,] 4.007279029 9.912652 -0.21158406 5.901733 -3.091854 14.8097054
## three_cone shuttle
## [1,] -0.59571924 -0.42854766
## [2,] 0.50428076 0.30145234
## [3,] 0.03428076 -0.02854766
## [4,] -0.74571924 -0.37854766
## [5,] -0.18571924 -0.17854766
## [6,] 0.22428076 0.07145234\[\frac{A^TA}{n-1}\]
## height weight forty vertical bench
## height 7.1597944 90.788084 0.52676257 -5.065512 6.2780614
## weight 90.7880840 2105.176834 13.04832553 -132.887401 188.5644427
## forty 0.5267626 13.048326 0.10318906 -1.034265 0.9549273
## vertical -5.0655119 -132.887401 -1.03426459 18.232972 -8.7243553
## bench 6.2780614 188.564443 0.95492726 -8.724355 40.8989801
## broad_jump -11.2472274 -330.417460 -2.55786742 33.083582 -24.1124924
## three_cone 0.5955444 15.944407 0.11523591 -1.245058 1.2152061
## shuttle 0.3912377 9.644035 0.06894544 -0.811669 0.6913887
## broad_jump three_cone shuttle
## height -11.247227 0.59554442 0.39123769
## weight -330.417460 15.94440664 9.64403467
## forty -2.557867 0.11523591 0.06894544
## vertical 33.083582 -1.24505770 -0.81166895
## bench -24.112492 1.21520610 0.69138865
## broad_jump 90.079934 -3.11504850 -1.89762575
## three_cone -3.115048 0.18612283 0.09866407
## shuttle -1.897626 0.09866407 0.07283010## [1] 7.159794## [1] 7.159794## [1] 90.78808## [1] 90.78808## [1] 90.78808PCA的理解,相关性越高,越冗余(redundant)。 (Eager 2018, Chapter 4.3) 这也是求解Cov的一个原因即发现这种Redundancy。
## [1] 2.187628e+03 4.403246e+01 2.219205e+01 5.267129e+00 2.699702e+00
## [6] 6.317016e-02 1.480866e-02 1.307283e-02The profile of the data can be attributed to one linear combination of the data. (Eager 2018, Chapter 4)
The profile of the data \(\to\) the variance of data.
9.8.9 Completed
参考文献
3Blue1Brown. 2018. “线性代数的本质.” 2018. https://www.bilibili.com/video/av16144388/.
Eager, Eric. 2018. “Linear Algebra for Data Science in R.” DataCamp. 2018. https://www.datacamp.com/courses/linear-algebra-for-data-science-in-r.
Wang, Zhongdao, Liang Zheng, Yali Li, and Shengjin Wang. 2019. “Linkage Based Face Clustering via Graph Convolution Network.”